Llojet themelore të reagimit të lidhjeve mekanike. Lidhjet dhe reagimet e lidhjeve
Lidhjet dhe reagimet e lidhjeve
Të gjitha ligjet dhe teoremat e statikës janë të vlefshme për një trup të ngurtë të lirë.
Të gjithë trupat ndahen në të lirë dhe të lidhur.
Trupat e lirë janë trupa, lëvizja e të cilëve nuk është e kufizuar.
Trupat e lidhur janë trupa, lëvizja e të cilëve kufizohet nga trupa të tjerë.
Trupat që kufizojnë lëvizjen quhen trupa të tjerëlidhjet.
Forcat që veprojnë nga lidhjet dhe pengojnë lëvizjen quhenreagimet e lidhjeve.
Reagimi i komunikimit drejtohet gjithmonë nga anaku nuk mund të shkosh.
Çdo trup i lidhur mund të imagjinohet si i lirë nëse lidhjet zëvendësohen nga reaksionet (parimi i çlirimit nga lidhjet).
Të gjitha lidhjet mund të ndahen në disa lloje.
Lidhja - mbështetje e qetë (pa fërkim)
Foto 1
Reaksioni mbështetës zbatohet në pikën mbështetëse dhe është gjithmonë i drejtuar pingul me suportin (Fig. 1).
Komunikim fleksibël
(fije, litar, kabllo, zinxhir) Ngarkesa është e varur në dy fije (Fig. 2).
Figura 2
Shufra e fortë
Në diagrame, shufrat përshkruhen si një vijë e trashë e fortë (Fig. 3).

Figura 3
Shufra mund të jetë e ngjeshur ose e shtrirë. Reagimi i shufrës drejtohet përgjatë shufrës. Shufra punon në tension ose ngjeshje. Drejtimi i saktë i reagimit përcaktohet duke hequr mendërisht shufrën dhe duke marrë parasysh lëvizjet e mundshme të trupit pa këtë lidhje.
Zhvendosje e mundshme pika është një lëvizje mendore e tillë pafundësisht e vogël që lejohet në një moment të caktuar nga lidhjet që i imponohen.
Ne heqim shufrën 1, në këtë rast shufra 2 bie poshtë. Prandaj, forca nga shufra 1 (reaksioni) drejtohet lart. Ne heqim shufrën 2. Në këtë rast, pikaA bie poshtë, duke u larguar nga muri. Rrjedhimisht, reagimi i shufrës 2 drejtohet drejt murit.
Mbështetje e artikuluar
Mentesha lejon rrotullimin rreth pikës së lidhjes. Ka dy lloje menteshash.
Mentesha e lëvizshme
Shufra e bashkangjitur në menteshë mund të rrotullohet rreth menteshës dhe pika e lidhjes mund të lëvizë përgjatë udhëzuesit (platformës) (Fig. 4).

Figura 4
Reagimi i menteshës së lëvizshme drejtohet pingul me sipërfaqen mbështetëse, pasi nuk lejohet vetëm lëvizja nëpër sipërfaqen mbështetëse.
Mentesha e fiksuar
Pika e lidhjes nuk mund të zhvendoset. Shufra mund të rrotullohet lirshëm rreth boshtit të menteshës. Reagimi i një mbështetjeje të tillë kalon përmes boshtit të menteshës, por drejtimi i tij nuk dihet. Zakonisht përshkruhet si dy komponentë: horizontale dhe vertikale( Rx ; R y) (Fig. 5).
Figura 5
Mbërthimi ose "vulosja"
Çdo lëvizje e pikës së lidhjes nuk është e mundur.
Nën ndikimin e forcave të jashtme, në mbështetje lind një forcë reaktive dhe një moment reaktiv M R , duke parandaluar rrotullimin (Fig. 6).
Figura 6
Forca reaktive zakonisht paraqitet si dy komponentë përgjatë boshteve koordinative![]()
Shembuj të zgjidhjes së problemeve
Shembulli 1. Ngarkesa është e varur në shufra dhe litarë dhe është në ekuilibër (Fig. 7). Vizatoni sistemin e forcave që veprojnë në menteshA.

Figura 7
Zgjidhje
1. Reaksionet e shufrave drejtohen përgjatë shufrave, reaksionet e lidhjeve fleksibël drejtohen përgjatë fijeve në drejtim të tensionit (Fig. 7a).
2. Për të përcaktuar drejtimin e saktë të forcave në shufra, hiqni mendërisht shufrat 1 dhe 2 Analizoni lëvizjet e mundshme të pikësA.
Ne nuk e konsiderojmë një bllok të palëvizshëm me forca që veprojnë mbi të.
3. Hiqni shufrën 1, pikëA ngrihet dhe largohet nga muri, prandaj, reagimi i shufrës 1 drejtohet drejt murit.
4. Hiqni shufrën 2, pikëA ngrihet dhe i afrohet murit, prandaj, reagimi i shufrës 2 drejtohet nga muri poshtë.
5. Litari tërhiqet djathtas.
6. Çlironi veten nga lidhjet (Fig. 7b).
Shembulli 2. Topi është i varur në një fije dhe mbështetet në mur (Fig. 8a). Përcaktoni reagimet e fillit dhe të suportit të lëmuar (murit).

Figura 8
Zgjidhje
1. Reagimi i fillit - përgjatë fillit deri në një pikëNË lart (Fig. 8b).
2. Reagimi i një suporti (muri) të lëmuar - normal me sipërfaqen mbështetëse.
Pyetjet dhe detyrat e testit
4. Tregoni drejtimin e mundshëm të reaksioneve nëmbështet(Fig. 9).

Figura 9
1. Një rrafsh ose sipërfaqe e lëmuar (pa fërkim). Lidhje të tilla parandalojnë që trupi të lëvizë vetëm në drejtim të normales së përbashkët në pikën e kontaktit, përgjatë së cilës do të drejtohet reagimi përkatës. Prandaj, reaksioni i një suporti të sheshtë të lëmuar është pingul me këtë mbështetje (reaksioni në Fig. 12,a); reaksioni i një muri të lëmuar është pingul me këtë mur Fig. 12, b); reaksioni i një sipërfaqeje të lëmuar drejtohet përgjatë normales në këtë sipërfaqe, të tërhequr në pikën e kontaktit në Fig. 12, c).

2. Zvarritje e mprehtë. Në këtë rast, mund të supozojmë se vetë zgjatja është e mbështetur, dhe trupi në fjalë shërben si mbështetje. Kjo çon në rastin 1 dhe në përfundimin se reagimi i një zgjatjeje të lëmuar drejtohet normalisht në sipërfaqen e trupit mbështetës (forca në Fig. 12, c).
3. Lidhje fleksibël (fije pa peshë, kabllo, zinxhir etj.). Reagimi përkatës drejtohet përgjatë lidhjes nga pika e ngjitjes së fillit deri në pikën e pezullimit (forca në Fig. 11, d, forca në Fig. 12, b).
4. Shufra e drejtë pa peshë me mentesha në skajet. Reagimi drejtohet përgjatë shufrës. Meqenëse shufra mund të jetë ose e ngjeshur ose e shtrirë, reaksioni mund të drejtohet si drejt pikës së pezullimit të shufrës ashtu edhe larg nga pika e pezullimit (reaksionet në Fig. 13, a).
5. Shufra e përkulur ose e lakuar pa peshë. Reagimi drejtohet përgjatë një linje të drejtë që kalon nëpër qendrat e menteshave fundore (forca 53 në Fig. 13, a; forca S në Fig. 13, b).

6. Mbështetje e menteshës së lëvizshme. Reaksioni drejtohet pingul me rrafshin mbështetës (rrafshi i rrotullimit) (Fig. 14, a, b).

7. Mentesha cilindrike (Fig. 15, a), kushineta radiale (Fig. 15, b). Reaksioni kalon nëpër qendrën e menteshës (qendra e seksionit të mesëm të kushinetës) dhe shtrihet në një plan pingul me boshtin e menteshës (kushineta).
Është e barabartë me dy forca të panjohura në madhësi - përbërësit e këtij reaksioni përgjatë boshteve koordinative përkatëse (forcat në Fig. 15, a; dhe në Fig. 15, b). (Për një shpjegim të kësaj, shihni gjithashtu shembullin në faqen 16).


8. Mentesha sferike (Fig. 16, a), mbajtëse shtytëse (ose mbajtëse kontakti këndor) (Fig. 16, b). Reaksioni përbëhet nga tre forca të panjohura në madhësi - përbërësit e reaksionit përgjatë boshteve të sistemit koordinativ hapësinor.
9. Vulë e fortë (Fig. 17). Kur një sistem i rrafshët forcash vepron në një trup, reagimi total i ngulitjes përbëhet nga një forcë me përbërësit XA dhe UA, dhe një palë forcash me një moment M, të vendosura në të njëjtin rrafsh me forcat që veprojnë.
10. Vula rrëshqitëse (Fig. 18). Në rastin e një sistemi të rrafshët të forcave dhe mungesës së fërkimit, reaksioni përbëhet nga një forcë N dhe një çift forcash me një moment M, të vendosura në të njëjtin rrafsh me forcat që veprojnë. Forca N është pingul me drejtimin e rrëshqitjes.



Pyetje vetë-testimi
1. Çfarë quhet trup absolutisht i ngurtë, pikë materiale?
2. Identifikoni elementet e forcës. Në çfarë mënyrash mund ta vendosni forcën?
3. Si quhet momenti vektorial i forcës në raport me një pikë Çfarë është momenti algjebrik i forcës?
4. Në cilin rast momenti i forcës në raport me një pikë është i barabartë me zero?
5. Çfarë quhet sistem forcash? Cilat sisteme forcash quhen ekuivalente?
6. Si quhet sistemi rezultant i forcave?
7. Përcaktoni një reaksion të ngurtë jo të lirë, lidhje, lidhje?
8. A mund të konsiderohet i lirë një trup jo i lirë?
9. Në cilat dy grupe ndahen forcat që veprojnë në një trup të ngurtë jo të lirë?
Çdo trup i lirë në hapësirë ka gjashtë shkallë lirie: ai mund të lëvizë përgjatë tre boshteve dhe të rrotullohet rreth këtyre boshteve. Trupat rrallë janë në gjendje të lirë në shumicën e rasteve, lëvizja e tyre është e kufizuar nga lidhjet. Kufizimet janë kufizime që përjashtojnë mundësinë e lëvizjes së një trupi në një drejtim të caktuar. Nëse forcat aktive veprojnë në një trup fiks, atëherë forcat reaktive ose reaksionet lindin në lidhjet, duke plotësuar sistemin e forcave aktive në një ekuilibër. Kombinimi i forcave të balancuara aktive dhe reaktive përcakton gjendjen e stresuar të trupit dhe deformimin e tij.
Reaksionet e lidhjes gjenden duke përdorur ekuacionet e ekuilibrit. Në këtë rast, vendimi merret sipas planit të mëposhtëm:
- të identifikojë forcat e jashtme aktive të aplikuara në një trup ose grup trupash të zgjedhur;
- objekti (trupi) i zgjedhur lirohet nga lidhjet dhe në vend të tyre zbatohen forcat e reagimit të lidhjeve;
- Pasi kanë zgjedhur boshtet e koordinatave, ata përbëjnë ekuacionet e ekuilibrit dhe, pasi i kanë zgjidhur ato, gjejnë forcat e reagimit të lidhjeve.
Për një sistem hapësinor forcash, mund të përpilohen gjashtë ekuacione ekuilibri (13.7). Duke përdorur këto ekuacione, përcaktohen gjashtë reaksione të panjohura.
Problemet që mund të zgjidhen vetëm duke përdorur ekuacionet e ekuilibrit statik quhen të përcaktueshme në mënyrë statike. Nëse një numër më i madh lidhjesh vendosen në objektin e zgjedhur, atëherë detyra bëhet statikisht e papërcaktuar dhe për zgjidhjen e tij, përveç ekuacioneve të ekuilibrit, duhet të përdoren ekuacione shtesë të përpiluara në bazë të analizës së deformimit. Në përgjithësi, sigurimi ose lidhja e dy pjesëve mund të eliminojë nga një deri në gjashtë shkallë lirie, d.m.th. imponojnë nga një deri në gjashtë lidhje. Në përputhje me këtë, nga një deri në gjashtë reagime mund të ndodhin në konsolidim. Sasia e forcave reaktive dhe drejtimi i tyre varet nga natyra e lidhjeve.
Këtu janë llojet më të zakonshme të pjesëve të fiksimit dhe lidhjes.
- 1. Lidhjet që përjashtojnë mundësinë e lëvizjes vetëm në një drejtim. Në komponime të tilla, ndodh vetëm një reagim i një drejtimi të caktuar. Lidhjet e këtij lloji përfshijnë:
- a) lidhje duke prekur dy trupa në një pikë ose përgjatë një vije. Kur preket, ndodh një reaksion i drejtuar përgjatë normales së përgjithshme në sipërfaqet prekëse (Fig. 13.5). Një lidhje e tillë quhet e artikuluar-lëvizshme;
Oriz. 13.5.
- b) lidhja e bërë nga një kabllo, fije, zinxhir jep një reagim të drejtuar përgjatë një lidhjeje fleksibël, dhe një lidhje e tillë mund të funksionojë vetëm në tension (shih Fig. 13.5, b);
- c) një lidhje në formën e një shufre të drejtë të ngurtë me skaje të varura gjithashtu jep një reagim të drejtuar përgjatë boshtit të shufrës (shih Fig. 13.5, Mace por mund të funksionojë si në tension ashtu edhe në shtypje.

Oriz. 13.6.
Në Fig. 13.5, G tregohet një trup me tre kufizime të vendosura mbi të; çdo lidhje përjashton mundësinë e lëvizjes në një drejtim dhe jep një reagim, drejtimi i të cilit dihet.
- 2. Një fiksim ose lidhje që përjashton lëvizjen në dy drejtime dhe, në përputhje me rrethanat, jep dy reaksione, quhet një mbështetëse e fiksuar me varëse ose një menteshë cilindrike (Fig. 13.6).
- 3. Lidhja që përjashton lëvizjen në tre drejtime dhe jep tre reaksione quhet nyje hapësinore ose topike (Fig. 13.7).
- 4. Mbërthimi që përjashton të gjashtë shkallët e lirisë quhet fiksim i ngurtë ose ngulitje. Gjashtë faktorë të forcës reaktive mund të lindin në ngulitje - tre forca reaktive dhe tre momente reaktive (Fig. 13.8). Kur forcat e vendosura në një rrafsh veprojnë në një trup me një ngulitje të ngurtë, dy forca reaktive dhe një moment reaktiv lindin në ngulitje.

Oriz. 13.7.

Oriz. 13.8.
Kur bëni llogaritjet, mbështetësit skematizohen dhe ndahen me kusht në tre grupe kryesore:
- të artikuluara dhe të lëvizshme(Fig. 13.9, A), duke perceptuar vetëm një reagim linear /?;
- artikuluar-fiksuar(Fig. 13.9, b), duke perceptuar dy reaksione lineare R Dhe N.
- pinching, ose vulosje(Fig. 13.9, V), perceptimi i reaksioneve lineare R Dhe N dhe momenti M.

Oriz. 13.9.
Kur trupat realë vijnë në kontakt dhe gjatë lëvizjes së tyre relative, forcat e fërkimit lindin në vendet e kontaktit të tyre, të cilat mund të konsiderohen si një lloj i veçantë i forcave reaktive. Forca e fërkimit ndodhet në rrafshin e kontaktit të trupave; kur lëviz, ai drejtohet në drejtim të kundërt me shpejtësinë relative të trupit.
Shembull. Boshti 1 me ingranazhin 2 të ngjitur në të është montuar në dy kushineta A Dhe NË. Në skajin e lirë të boshtit është montuar një rrotull me rrip 3 (Fig. 13.10 Dimensionet gjeometrike). A, s, çift rrotullimi transmetues M, diametri i rrotullës D, të gjithë parametrat e ingranazhit të pjerrët, si dhe raporti i forcave të tensionit të rripit F a JF al= 2. Është e nevojshme të përcaktohet reagimi i mbështetësve dhe forca e tensionit të rripit.

Oriz. 13.10.
Ne e kryejmë zgjidhjen në tre hapa.
1. Identifikojmë forcat aktive që veprojnë në sistem. Një forcë e vendosur në hapësirë vepron në një ingranazh të pjerrët, përbërësit e të cilit përgjatë boshteve të koordinatave janë përcaktuar në përputhje me rrethanat F v F r Dhe F a . Komponenti F (, e quajtur forca rrethore, përcaktohet nga një çift rrotullues i caktuar bazuar në ekuacionin e momenteve rreth boshtit z

Komponenti radial F r dhe komponenti boshtor F a përcaktohet nga forca rrethore F ( bazuar në gjeometrinë e specifikuar të ingranazhit të pjerrët.
2. Ne e çlirojmë boshtin (objektin e ekuilibrit) nga lidhjet dhe në vend të kësaj zbatojmë forcat e reagimit X l U l, X c, Y B Z B .
Kushinetat A Dhe NË duhet të konsiderohen si mbështetëse me varëse, pasi ato kanë gjithmonë boshllëqe. Ne mbeshtetje A ndodhin dy reaksione X l Dhe U l, meqenëse kjo mbështetje ndalon lëvizjen e boshtit vetëm në drejtime tërthore. Tre reagime ndodhin në mbështetjen e duhur X në, U në Dhe Z B, meqenëse kufizon lëvizjen e boshtit edhe në drejtim aksial. Forcat aktive dhe reaktive së bashku formojnë një sistem hapësinor të forcave të balancuara.
3. Zgjidhni një sistem koordinatash: boshtet X Dhe në vendosur në një rrafsh pingul me boshtin e boshtit, dhe boshtin z drejtojmë përgjatë boshtit të boshtit. Ne krijojmë gjashtë ekuacione ekuilibri duke përdorur (13.7) dhe (13.8).

Duke përdorur një kusht të caktuar F al = 2F ii2 dhe duke zgjidhur ekuacionet e ekuilibrit, gjejmë forcat F aV F a2 dhe reagimet mbështetëse
Një nga konceptet bazë të mekanikës është koncepti i një sistemi mekanik. Një sistem mekanik kuptohet si një grup i një numri të kufizuar ose të pafund pikash (ose trupash) materiale që ndërveprojnë me njëra-tjetrën në përputhje me ligjin e tretë të Njutonit. Nga kjo rrjedh se lëvizja e çdo pike (ose trupi) të sistemit varet si nga pozicioni ashtu edhe nga lëvizja e pikave të mbetura të sistemit mekanik në shqyrtim.
Sistemet dallohen midis të lira dhe jo të lira. Një sistem quhet i lirë nëse të gjitha pikat e përfshira në të mund të zënë pozicione arbitrare dhe të kenë shpejtësi arbitrare. Përndryshe, pra kur pikat materiale të përfshira në sistem nuk mund të zënë pozicione arbitrare ose nuk mund të kenë shpejtësi arbitrare, sistemi quhet jo i lirë.
Një shembull i një sistemi mekanik të lirë është sistemi diellor, në të cilin Dielli dhe planetët mund të konsiderohen si trupa materialë nën veprimin e ndërsjellë të forcave gravitacionale të Njutonit.
Një shembull i një sistemi jo të lirë është një sistem i përbërë nga pika, nga të cilat një ose
Disa janë të detyruar të qëndrojnë në disa vija ose sipërfaqe gjatë lëvizjes së tyre.
Me këtë ndarje të sistemeve në të lira dhe jo të lira është i lidhur koncepti i komunikimit.
Në mekanikë, bashkimi kuptohet si kushte që vendosin kufizime në lirinë e lëvizjes së pikave në një sistem. Lidhjet mund të vendosin kufizime si në pozicionet e pikave ashtu edhe në shpejtësinë e tyre. Në praktikë, lidhjet bëhen duke përdorur trupa ose pajisje materiale (shufra, fije, mentesha, etj.).
Ashtu si forcat që veprojnë në pikat e sistemit ndahen në forca të brendshme dhe të jashtme, ashtu edhe lidhjet e imponuara në pikat e sistemit mund të ndahen në lidhje të brendshme dhe lidhje të jashtme. Me lidhje të brendshme nënkuptojmë ato lidhje që, kur aplikohen në pika të sistemit, nuk e pengojnë sistemin të lëvizë lirshëm pasi të ngurtësohet papritur. Një lidhje që nuk e ka këtë veti quhet e jashtme. Për shembull, nëse dy pika të një trupi të ngurtë lidhen me njëra-tjetrën nga një shufër e pazgjatshme dhe pa peshë, atëherë një lidhje e tillë do të jetë e brendshme. Kështu, një trup i fortë mund të konsiderohet si një sistem që i nënshtrohet lidhjeve të brendshme. Nëse një nga pikat e trupit të ngurtë është i varur, atëherë në këtë rast lidhja do të jetë e jashtme.
Një sistem që i nënshtrohet vetëm lidhjeve të brendshme është i lirë, pasi mund të lëvizë si një trup i ngurtë i lirë. Nëse midis lidhjeve të vendosura në pikat e sistemit ka lidhje të jashtme, atëherë sistemi nuk është i lirë.
Kushtet që kufizojnë lirinë e lëvizjes së pikave të sistemit shprehen analitikisht në formën e ekuacioneve ose pabarazive të formës.
ku është koha, janë përkatësisht koordinatat dhe shpejtësitë e një pike të sistemit,
referuar një sistemi referimi inercial në lidhje me të cilin merret parasysh lëvizja e këtij sistemi.
Lidhjet dallohen midis mbajtjes dhe mosmbajtjes; E para korrespondon me shenjën e barazimit në (1.1), e dyta korrespondon me shenjën e pabarazisë.
Lidhjet mbajtëse dhe ato që nuk përmbajnë ndonjëherë quhen përkatësisht lidhje dykahëshe dhe njëkahëshe. Lidhja mbajtëse, duke parandaluar lëvizjen në një drejtim, gjithashtu parandalon lëvizjen në drejtim të kundërt. Një lidhje jo frenuese parandalon lëvizjen në një drejtim, por nuk parandalon lëvizjen në drejtim të kundërt.
Një shembull i një lidhjeje mbajtëse do të ishin dy rrafshe paralele midis të cilave lëviz topi. Duke e konsideruar rrafshin e mesëm ndërmjet tyre si plan koordinativ, marrim ekuacionin e kufizimit në formën: Nëse topi lëviz përgjatë një rrafshi horizontal në çdo moment dhe mund ta lërë atë, atëherë ky plan do të jetë një kufizim jo frenues. Kushti për një lidhje të tillë do të shprehet me pabarazinë (ose ).
Një shembull tjetër i një lidhjeje që nuk mban është një varg me një top në fund. Duke marrë pikën e pezullimit të fillit si origjinë të koordinatave dhe duke e konsideruar fillin si të pazgjerueshëm, mund të shkruajmë gjendjen e kësaj lidhjeje në formën e pabarazisë.
ku janë koordinatat e topit dhe është gjatësia e fillit.
Nëse gjatë lëvizjes së topit plotësohet pabarazia
kjo do të thotë që filli është liruar dhe topi lirohet nga lidhja e tij.
Nëse, kur topi lëviz, barazia
atëherë kjo do të thotë që filli është i tendosur dhe një lidhje vepron në top.
Në varësi të faktit nëse ekuacioni i bashkimit përmban në mënyrë eksplicite kohë apo jo, bashkimet ndahen në jo-stacionare (reonomike) dhe stacionare (skleronomike).
Lidhjet që vendosin kufizime vetëm në pozicionet e pikave në sistem quhen të fundme ose gjeometrike; analitikisht ato shprehen me ekuacion
Këtu dhe në vijim supozojmë se lidhjet po mbahen.
Nëse lidhjet vendosin kufizime jo vetëm në pozicionet e pikave, por edhe në shpejtësinë e tyre, atëherë ato quhen diferenciale ose kinematike dhe shprehja e tyre analitike ka formën
Lidhjet ndahen gjithashtu në holonomike dhe joholonomike. Lidhjet holonomike përfshijnë të gjitha lidhjet e fundme ose gjeometrike të formës (1.2), d.m.th., të gjitha lidhjet që vendosin kufizime në pozicionet e mundshme të pikave në sistem. Lidhjet holonomike përfshijnë gjithashtu lidhje diferenciale, të cilat me integrim mund të reduktohen në marrëdhënie të formës (1.2):

ku janë disa funksione të koordinatave, mundësisht koha.
Nëse lidhjet diferenciale të formës (1.4) nuk mund të reduktohen me integrim në marrëdhëniet e fundme të formës (1.2), atëherë ato quhen
joholonomike ose jointegruese. G. Hertz tërhoqi vëmendjen për rëndësinë e dallimit midis lidhjeve holonomike dhe joholonomike për konceptin e lëvizjes virtuale të sistemit.
Është e lehtë të shihet se nëse kufizimet holonomike vendosin kufizime në pozicionet e mundshme të pikave në sistem, atëherë kufizimet joholonomike vendosin kufizime në shpejtësitë e pikave në sistem. Kjo rrjedh nga fakti se ekuacioni i lidhjes joholonomike (1.4) mund të përfaqësohet gjithmonë në formën e mëposhtme:

Sistemet mekanike që i nënshtrohen kufizimeve holonomike quhen sisteme holonomike. Nëse midis lidhjeve ka edhe ato joholonomike, atëherë sistemet quhen joholonomike.
Nëse në një sistem vendosen vetëm kufizime joholonomike, atëherë një sistem i tillë quhet plotësisht joholonomik ose siç duhet joholonomik.
Një shembull klasik i lëvizjes së një sistemi joholonomik është rrotullimi i një topi të fortë në një plan të ashpër (për shembull, lëvizja e një topi të bilardos).
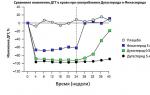
Lëreni një top të fortë me rreze të rrokulliset pa u rrëshqitur në një plan absolutisht të ashpër. Le të marrim dy sisteme koordinatash me një origjinë të përbashkët në qendër të topit C. Le të lëvizim njëri prej tyre (sistemi) në mënyrë të përkthimit, dhe le i dyti (sistemi) të lidhet fort me topin (Fig. 1).
Pozicioni i topit në çdo moment mund të përcaktohet nga pesë koordinata: dy koordinata të qendrës së topit (koordinata e tretë) dhe tre kënde të Euler: këndi i precesionit, këndi i nuancës 0 dhe këndi i rrotullimit të duhur (Fig. 1). Kushti i lidhjes në problemin në shqyrtim është gjendja e prekjes së topit me rrafshin dhe përmbysja
në shpejtësinë zero të pikës A që prek topin. Duke marrë qendrën e topit C si një pol dhe duke treguar shpejtësinë e tij përmes shpejtësisë këndore të menjëhershme të rrotullimit të topit dhe rreze-vektor të tërhequr nga qendra e topit në pikën e kontaktit - përmes , ne mund të shkruajmë shpejtësia e pikës A në formën e mëposhtme:

Duke projektuar këtë barazi vektoriale në boshtin koordinativ dhe duke përmbushur kushtin e lidhjes, marrim
ku janë përbërësit e vektorit të shpejtësisë këndore. Ekuacioni i fundit është i integruar dhe jep një ekuacion të lidhjes që tregon se qendra e topit C lëviz në një rrafsh paralel me rrafshin dhe i ndarë prej tij në një distancë të barabartë me rrezen e topit R.
Të gjitha teoremat dhe ekuacionet e statikës rrjedhin nga disa dispozita fillestare, të pranuara pa prova matematikore dhe të quajtura aksioma ose parime të statikës. Aksiomat e statikës janë rezultat i përgjithësimeve të eksperimenteve dhe vëzhgimeve të shumta mbi ekuilibrin dhe lëvizjen e trupave, të konfirmuara në mënyrë të përsëritur nga praktika. Disa nga këto aksioma janë pasoja të ligjeve bazë të mekanikës, me të cilat do të njihemi në dinamikë.
Aksioma 1. Nëse dy forca veprojnë në një trup të lirë absolutisht të ngurtë, atëherë trupi mund të jetë në ekuilibër nëse dhe vetëm nëse këto forca janë të barabarta në madhësi ( F 1 = F 2) dhe drejtohen përgjatë një linje të drejtë në drejtime të kundërta (Fig. 10).
Fig.10
Aksioma 1 përcakton sistemin më të thjeshtë të balancuar të forcave, pasi përvoja tregon se një trup i lirë mbi të cilin vepron vetëm një forcë nuk mund të jetë në ekuilibër.
Aksioma 2. Veprimi i një sistemi të caktuar forcash në një trup absolutisht të ngurtë nuk do të ndryshojë nëse atij i shtohet ose hiqet një sistem i balancuar forcash.
Kjo aksiomë përcakton se dy sisteme forcash që ndryshojnë nga një sistem i balancuar janë ekuivalente me njëri-tjetrin.
Përfundimi i aksiomave 1 dhe 2. Veprimi i një force në një trup absolutisht të ngurtë nuk do të ndryshojë nëse pika e aplikimit të forcës zhvendoset përgjatë vijës së saj të veprimit në çdo pikë tjetër të trupit.
Fig.11
Në fakt, le të veprohet mbi një trup të ngurtë nga një forcë e aplikuar në një pikë A forca (Fig. 11). Le të marrim një pikë arbitrare në vijën e veprimit të kësaj force NË dhe zbatoni dy forca të balancuara në të dhe , të tilla që = , = . Kjo nuk do të ndryshojë efektin e forcës në trup. Por sipas aksiomës 1, forcat formojnë gjithashtu një sistem të ekuilibruar që mund të refuzohet. Si rezultat, në trup. Vetëm një forcë do të veprojë, e barabartë me, por e aplikuar në atë pikë NË.
Kështu, vektori që përfaqëson forcën mund të konsiderohet i aplikuar në çdo pikë të vijës së veprimit të forcës (një vektor i tillë quhet rrëshqitës).
Aksioma 3(aksioma e paralelogramit të forcave). Dy forca të aplikuara në një trup në një pikë kanë një rezultante të aplikuar në të njëjtën pikë dhe të përfaqësuar nga diagonalja e një paralelogrami të ndërtuar mbi këto forca, si në anët.
Vektor i barabartë me diagonalen e një paralelogrami të ndërtuar mbi vektorë dhe (Fig. 12) quhet shuma gjeometrike e vektorëve dhe : = + .
Fig.12
Madhësia e rezultatit
|
Sigurisht, një barazi e tillë do të vërehet vetëm me kushtin që këto forca të drejtohen përgjatë një linje të drejtë në një drejtim. Nëse vektorët e forcës rezultojnë të jenë pingul, atëherë
Rrjedhimisht, aksioma 3 mund të formulohet edhe si më poshtë: dy forca të aplikuara ndaj një trupi në një pikë kanë një rezultante të barabartë me shumën gjeometrike (vektoriale) të këtyre forcave dhe zbatohen në të njëjtën pikë.
Aksioma 4. Me çdo veprim të një trupi material në një tjetër, ka një reagim me të njëjtën madhësi, por të kundërt në drejtim.
Ligji i barazisë së veprimit dhe reagimit është një nga ligjet bazë të mekanikës. Nga kjo rezulton se nëse trupi A vepron në trupin B me një forcë, pastaj në të njëjtën kohë trupi NË ndikon në organizëm A me të njëjtën madhësi dhe forcë të drejtuar përgjatë së njëjtës vijë të drejtë, por në drejtim të kundërt = (Fig. 13). Sidoqoftë, forcat nuk formojnë një sistem të balancuar forcash, pasi ato zbatohen në trupa të ndryshëm.
Fig.13
Aksioma 5(parimi i ngurtësimit). Ekuilibri i një trupi të ndryshueshëm (të deformueshëm) nën ndikimin e një sistemi të caktuar forcash nuk do të prishet nëse trupi konsiderohet i ngurtësuar (absolutisht i ngurtë).
Deklarata e shprehur në këtë aksiomë është e qartë. Për shembull, është e qartë se ekuilibri i zinxhirit nuk do të prishet nëse lidhjet e tij konsiderohen të salduara me njëra-tjetrën, etj.
Lidhjet dhe reagimet e tyre.
Sipas përkufizimit, një trup që nuk është i lidhur me trupa të tjerë dhe mund të bëjë çdo lëvizje në hapësirë nga një pozicion i caktuar quhet falas(për shembull, një tullumbace në ajër). Trupi, lëvizjet e të cilit në hapësirë pengohen nga disa trupa të tjerë të fiksuar ose në kontakt me të quhet jo të lirë. Çdo gjë që kufizon lëvizjen e një trupi të caktuar në hapësirë do ta quajmë lidhje.
Për shembull, një trup i shtrirë në një tryezë është një trup jo i lirë. Lidhja e saj është rrafshi i tryezës, i cili e pengon trupin të lëvizë poshtë.
I ashtuquajturi parimi i çlirimit, të cilin do ta përdorim në të ardhmen. Është shkruar kështu.
Çdo trup jo i lirë mund të bëhet i lirë nëse lidhjet hiqen dhe veprimi i tyre në trup zëvendësohet nga forca të tilla që trupi të mbetet në ekuilibër.
Forca me të cilën një lidhje e caktuar vepron në një trup, duke parandaluar një ose një tjetër lëvizje të tij, quhet forca e reagimit (kundërveprimit) të lidhjes ose thjesht reagimi i lidhjes.
Pra, një trup i shtrirë në një tryezë ka një lidhje - tryezën. Trupi nuk është i lirë. Le ta bëjmë të lirë - do ta heqim tabelën dhe në mënyrë që trupi të mbetet në ekuilibër, do ta zëvendësojmë tabelën me një forcë të drejtuar lart dhe e barabartë, natyrisht, me peshën e trupit.
Reagimi i lidhjes drejtohet në drejtim të kundërt me atë në të cilin lidhja nuk e lejon trupin të lëvizë. Kur një lidhje pengon njëkohësisht lëvizjen e trupit në disa drejtime, edhe drejtimi i reagimit të lidhjes është i panjohur paraprakisht dhe duhet të përcaktohet si rezultat i zgjidhjes së problemit në shqyrtim.
Le të shqyrtojmë se si drejtohen reagimet e disa llojeve bazë të lidhjeve.
1. Rrafsh (sipërfaqe) ose mbështetje e lëmuar. Sipërfaqe të lëmuar do ta quajmë fërkimin rreth të cilit një trup i caktuar, në një përafrim të parë, mund të neglizhohet. Një sipërfaqe e tillë e pengon trupin të lëvizë vetëm në drejtim të pingulës së përbashkët (normale) me sipërfaqet e trupave kontaktues në pikën e kontaktit të tyre (Fig. 14, A). Prandaj reagimi N sipërfaqja e lëmuar ose mbështetësja drejtohet përgjatë normales së përbashkët me sipërfaqet e trupave kontaktues në pikën e kontaktit të tyre dhe aplikohet në këtë pikë. Kur një nga sipërfaqet kontaktuese është një pikë (Fig. 14, b), atëherë reaksioni drejtohet normalisht në sipërfaqen tjetër.
Nëse sipërfaqet nuk janë të lëmuara, duhet të shtoni një forcë tjetër - forcën e fërkimit, e cila drejtohet pingul me reagimin normal në drejtim të kundërt me rrëshqitjen e mundshme të trupit.
Fig.14 Fig.15
Fig.16
2. Fije. Lidhja, e bërë në formën e një filli fleksibël, të pazgjatur (Fig. 15), nuk i jep trupit M largohuni nga pika e pezullimit të fillit në drejtim JAM.. Prandaj reagimi T filli i tendosur drejtohet përgjatë fillit nga trupi deri në pezullimin e tij. Edhe nëse mund të merrni me mend paraprakisht se reagimi drejtohet drejt trupit, ai përsëri duhet të drejtohet larg trupit. Ky është rregulli. Ai eliminon supozimet e panevojshme dhe të panevojshme dhe, siç do të shohim më vonë, ndihmon në përcaktimin nëse shufra është e ngjeshur apo e shtrirë.
3. Lidhje (mbajtëse) cilindrike. Nëse dy trupa janë të lidhur me një rrufe në qiell që kalon nëpër vrima në këto trupa, atëherë një lidhje e tillë quhet një menteshë ose thjesht një varëse; Linja qendrore e bulonës quhet boshti i menteshës. Trupi AB, ngjitur nga një menteshë në mbështetëse D(Fig. 16, A), mund të rrotullohet sipas dëshirës rreth boshtit të menteshës (në planin e vizatimit); ky eshte fundi A trupi nuk mund të lëvizë në asnjë drejtim pingul me boshtin e menteshës. Prandaj reagimi R një menteshë cilindrike mund të ketë çdo drejtim në një rrafsh pingul me boshtin e menteshës, d.m.th. në aeroplan A hu. Për forcë R në këtë rast, as moduli i tij nuk dihet paraprakisht R, as drejtim (kënd).
4. Kushineta e bashkimit të topit dhe e shtytjes. Ky lloj lidhjeje rregullon një pikë të trupit në mënyrë që të mos bëjë asnjë lëvizje në hapësirë. Shembuj të lidhjeve të tilla janë thembra e topit, me të cilën kamera është ngjitur në trekëmbësh (Fig. 16, b) dhe një kushinetë me një shtytje (shtytje) (Fig. 16, V). Reagimi R një nyje topash ose kushinetë shtytëse mund të ketë çdo drejtim në hapësirë. Për të, as moduli i reagimit nuk dihet paraprakisht R, as këndet e formuara prej saj me boshtet x, y, z.
Fig.17
5. Shufra. Lidhja në një strukturë le të jetë një shufër AB, të siguruara në skajet me mentesha (Fig. 17). Le të supozojmë se pesha e shufrës mund të neglizhohet në krahasim me ngarkesën që ajo percepton. Atëherë vetëm dy forca të aplikuara në menteshat do të veprojnë në shufër A Dhe NË. Por nëse shufra ABështë në ekuilibër, atëherë, sipas aksiomës 1, zbatohet në pika A Dhe NË forcat duhet të drejtohen përgjatë një linje të drejtë, d.m.th. përgjatë boshtit të shufrës. Për rrjedhojë, një shufër e ngarkuar në skajet, pesha e së cilës mund të neglizhohet në krahasim me këto ngarkesa, funksionon vetëm në tension ose ngjeshje. Nëse një shufër e tillë është një lidhje, atëherë reagimi i shufrës do të drejtohet përgjatë boshtit të shufrës.
6. Mbështetje e lëvizshme me varëse (Fig. 18, mbështetëse A) pengon lëvizjen e trupit vetëm në drejtimin pingul me rrafshin rrëshqitës të suportit. Reagimi i një suporti të tillë drejtohet normalisht në sipërfaqen në të cilën mbështeten rrotullat e mbështetëses së lëvizshme.
7. Mbështetje e fiksuar me varëse (Fig. 18, mbështetëse NË). Reagimi i një mbështetjeje të tillë kalon përmes boshtit të menteshës dhe mund të ketë çdo drejtim në rrafshin e vizatimit. Gjatë zgjidhjes së problemeve, ne do të përshkruajmë reagimin sipas përbërësve të tij dhe përgjatë drejtimeve të boshteve të koordinatave. Nëse, pasi kemi zgjidhur problemin, gjejmë dhe , atëherë do të përcaktohet edhe reagimi; modul
Fig.18
Metoda e fiksimit e treguar në figurën 18 përdoret në mënyrë që në tra AB nuk u krijuan stres shtesë kur gjatësia e saj ndryshoi për shkak të ndryshimeve të temperaturës ose përkuljes.
Vini re se nëse mbështetja A Nëse trau (Fig. 18) është bërë gjithashtu i palëvizshëm, atëherë trau, kur ndonjë sistem i rrafshët i forcave vepron mbi të, do të jetë statikisht i papërcaktuar, pasi atëherë tre ekuacionet e ekuilibrit do të përfshijnë katër reaksione të panjohura, , , .
8. Mbështetje e fiksuar fiksuese ose ngulitje e ngurtë (Fig. 19). Në këtë rast, një sistem i forcave të shpërndara të reagimit vepron në skajin e ngulitur të rrezes nga ana e planeve mbështetëse. Duke i konsideruar këto forca për t'u sjellë në qendër A
Ndonjëherë ju duhet të studioni ekuilibrin e trupave jo të ngurtë. Në këtë rast, do të përdorim supozimin se nëse ky trup jo i ngurtë është në ekuilibër nën veprimin e forcave, atëherë ai mund të konsiderohet si një trup i ngurtë, duke përdorur të gjitha rregullat dhe metodat e statikës.