Kaj je povezava v mehaniki. Osnovne vrste vezi in njihove reakcije
PREDAVANJE TEORETIČNE MEHANIKE
Predavanje 1
Teoretična mehanika je veda o najsplošnejših zakonitostih mehanskega gibanja in ravnovesja materialnih teles.
Osnovni pojmi in definicije teoretične mehanike so nastali na podlagi številnih poskusov in opazovanj naravnih pojavov, čemur je sledilo abstrahiranje od specifičnih pogojev posameznega eksperimenta. V teoretični mehaniki se uporabljajo končne abstrakcije: materialna točka in absolutno togo telo. Zgornje abstrakcije omogočajo preučevanje najbolj splošnih zakonov mehanskega gibanja, kar ustreza glavni nalogi teoretične mehanike. Teoretična mehanika je osnova za preučevanje disciplin, kot so trdnost materialov in strojni deli.
Predmet teoretične mehanike je sestavljen iz treh delov: statike, kinematike in dinamike.
Statika je veja teoretične mehanike, ki proučuje statično ravnotežje materialnih teles pod vplivom sil, ki delujejo nanje.
Osnovni pojmi statike:
1. Če se določeno telo ne premika glede na drugo telo, potem pravimo, da je prvo telo v stanju relativnega ravnovesja. Telo, glede na katerega se obravnava ravnovesje drugih teles, se imenuje referenčno telo.
2. Vsako telo pod vplivom sil, ki delujejo nanj, spremeni svoje geometrijske dimenzije in obliko, tj. deformiran. V teoretični mehaniki se te deformacije ne upoštevajo in se upoštevajo samo nedeformabilna – absolutno toga telesa. Telo se imenuje absolutno trdno, če ostane razdalja med katerima koli točkama konstantna.
3. Merilo mehanskega medsebojnega delovanja teles je sila. Sila je vektorska količina, zanjo so značilne točka delovanja, smer in velikost (slika 1.1). Enota za silo je newton (N).
4. Skupek sil, ki delujejo na katero koli telo, imenujemo sistem sil. Sistem sil je označen ( , , , … ) – sistem sestavljen iz n sil.
5. Uravnotežen ali ničelni sistem sil je tak sistem sil, ki pri delovanju na trdno telo ne krši njegovega stanja. To pomeni, da če določeno telo ni spremenilo svojega položaja glede na referenčno telo pred uporabo uravnoteženega sistema sil, ga ne bo spremenilo niti po uporabi tega sistema nanj. Uravnoteženi sistem sil je označen takole: ( , , , … )<=>0 (<=>- znak enakovrednosti).
6. Če na neko telo delujemo s sistemom sil ( , , , … ) in nanj delujemo z drugim sistemom sil ( , , , … ), bo skupaj s prvim tvorilo uravnotežen sistem sil. V tem primeru sistem ( , , , …) imenujemo sistem ravnotežja sil. Če je ravnotežni sistem sestavljen iz ene sile, potem to silo imenujemo ravnotežna sila za sistem sil (, , , …).
7. Če je vsak od dveh sistemov sil ( , , , … ) in ( , , , … ) uravnotežen z istim sistemom sil ( , , , … ), potem sta prva dva sistema sil enaka drugemu ( , , , … )<=>( , , , … ). Sklep: zamenjava sistema sil, ki delujejo na telo, z njim enakovrednim sistemom ne spremeni stanja, v katerem se telo nahaja.
8. Če je sistem sil enakovreden eni sili, potem se ta sila imenuje rezultanta tega sistema sil.
Aksiomi statike
Aksiom 1. Prosto absolutno togo telo je v ravnotežju pod delovanjem dveh sil, če in samo če sili delujeta vzdolž ene premice v nasprotnih smereh in imata enake module.

Aksiom 2. Delovanje danega sistema sil na absolutno togo telo se ne bo spremenilo, če mu dodamo ali izločimo sistem sil, ki je enak nič.
{ , , , … } <=> { , , , … , , , , … };
{ , , , … } <=> 0
| |
| |
Aksiom 4. Sile interakcije med dvema telesoma so enake po velikosti in usmerjene vzdolž ene ravne črte v nasprotnih smereh.
Telo se imenuje prost, če njegovo gibanje v prostoru ni z ničemer omejeno. Če so naložene omejitve gibanja točk telesa, se imenuje telo nesvoboden ali sorodni. Materialna telesa, ki omejujejo gibanje danega telesa, imenujemo zveze. Silo, s katero vez deluje na dano telo, imenujemo reakcija vezi. Na zvezo deluje sila, na telo pa reakcija zveze.
Aksiom 5. (Aksiom osvoboditve od povezav). Ravnovesje telesa ne bo porušeno, če povezave, ki so mu vsiljene, nadomestimo z reakcijami povezav.
Aksiom 6. (Aksiom o strjevanju). Ravnotežje deformabilnega telesa se ne bo spremenilo, če se nanj naložijo dodatne omejitve ali če postane absolutno trdno.
Posledice aksiomov
Posledica 1. Sila, ki deluje na absolutno togo telo, se lahko prenese na katero koli točko na njegovi liniji delovanja. V tem primeru se učinek sile na telo ne bo spremenil.
Dokaz:
 Naj sila, ki deluje na točko, deluje na togo telo A(slika 1.4). Prijavimo se kdaj IN premice delovanja sil F sistem sil ( , )<=>0, kar je dovoljeno na podlagi aksioma 2. Sprejmimo = = . Kot rezultat dobimo sistem sil ( , , )<=> .
Naj sila, ki deluje na točko, deluje na togo telo A(slika 1.4). Prijavimo se kdaj IN premice delovanja sil F sistem sil ( , )<=>0, kar je dovoljeno na podlagi aksioma 2. Sprejmimo = = . Kot rezultat dobimo sistem sil ( , , )<=> .
Upoštevajte, da ( , )<=>0, na podlagi aksioma 2 lahko ta sistem sil zavržemo. Dobimo<=>{ , , }<=> .
Sklep: sila je drseči vektor.
Posledica 2. Izrek o nujnem pogoju za ravnotežje telesa pod delovanjem treh nevzporednih sil, ki ležijo v isti ravnini.
Če je prosto telo v stanju ravnotežja pod delovanjem treh nevzporednih sil, ki ležijo v isti ravnini, potem se liniji delovanja teh sil sekata v eni točki.
Dokaz:
 Naj na telo delujejo tri sile , , (slika 1.5). ( , , )<=>0. Ker liniji delovanja sil nista vzporedni, se bosta katerikoli dve od njiju (tudi če ) na neki točki sekali O. Premaknimo F 1 in F 2 k bistvu O in te sile nadomestimo z rezultanto. Dobimo ( , , )<=>( , ), in da je telo v ravnotežju, mora biti izpolnjen pogoj: = , in morata biti usmerjeni vzdolž ene premice v nasprotni smeri. To pomeni, da mora linija delovanja sile potekati skozi točko presečišča linij delovanja sil in.
Naj na telo delujejo tri sile , , (slika 1.5). ( , , )<=>0. Ker liniji delovanja sil nista vzporedni, se bosta katerikoli dve od njiju (tudi če ) na neki točki sekali O. Premaknimo F 1 in F 2 k bistvu O in te sile nadomestimo z rezultanto. Dobimo ( , , )<=>( , ), in da je telo v ravnotežju, mora biti izpolnjen pogoj: = , in morata biti usmerjeni vzdolž ene premice v nasprotni smeri. To pomeni, da mora linija delovanja sile potekati skozi točko presečišča linij delovanja sil in.
Predavanje 2
Vrste povezav in njihove reakcije
Pri reševanju tehničnih problemov je potrebno iskati reakcije različnih povezav. Splošno pravilo, ki ga je treba uporabiti, je naslednje: če je gibanje katere koli točke telesa omejeno, potem je treba reakcijo uporabiti na tej točki v smeri, nasprotni smeri, v kateri je gibanje omejeno.
Glavne vrste povezav:
1. Gladka površina ali podpora. Površina, na kateri lahko zanemarimo trenje, se šteje za gladko. Reakcija gladke površine se reducira samo na reakcijo, usmerjeno vzdolž splošne normale na dotične površine, ob predpostavki, da ta normala obstaja (slika 2.1.a). Če ni skupne normale, to pomeni, da ima ena od površin kotno točko ali "točko", je reakcija usmerjena vzdolž normale na drugo površino (slika 2.1.b).
3.  Fleksibilna komunikacija. Ta vrsta povezave vključuje povezave z verigo, kablom, vrvjo itd. Reakcija takšne povezave je vedno usmerjena vzdolž povezave (slika 2.3).
Fleksibilna komunikacija. Ta vrsta povezave vključuje povezave z verigo, kablom, vrvjo itd. Reakcija takšne povezave je vedno usmerjena vzdolž povezave (slika 2.3).
4. Cilindrični tečaj (slika 2.4) in ležaj (nosilec B na sliki 2.5). Cilindrični tečaj je povezava med dvema ali več telesi s pomočjo valjaste palice, tako imenovanega zatiča, vstavljenega v luknje v teh telesih. Cilindrični tečaj preprečuje premikanje v katero koli smer v ravnini XOY. Reakcija fiksnega cilindričnega tečaja (zgibno-fiksna podpora) je predstavljena v obliki neznanih komponent in , katerih linije delovanja so vzporedne ali sovpadajo s koordinatnimi osmi (slika 2.4).
5. Aksialni ležaj (nosilec A, slika 2.5) in sferični tečaj (slika 2.6). Ta vrsta povezave je lahko predstavljena v obliki palice s sferično površino na koncu, ki je pritrjena na nosilec, ki je del sferične votline. Sferični tečaj preprečuje premikanje v katero koli smer v prostoru, zato je njegova reakcija predstavljena v obliki treh komponent, , , , vzporednih z ustreznimi koordinatnimi osemi.
6. 
 |
Zgibna in premična podpora. Ta vrsta povezave je konstrukcijsko izdelana v obliki cilindričnega tečaja, ki se lahko prosto giblje po površini. Reakcija zgibne premične opore je vedno usmerjena pravokotno na oporno površino (opora A na sliki 2.7).
7. Zgibno-fiksna podpora. Reakcija zgibno-fiksnega nosilca je predstavljena v obliki neznanih komponent in , katerih linije delovanja so vzporedne ali sovpadajo s koordinatnimi osemi (nosilec B na sliki 2.7).
8. Breztežna palica (ravna ali ukrivljena), na koncih pritrjena s tečaji. Reakcija takšne palice je določena in usmerjena vzdolž črte, ki povezuje središča tečajev (slika 2.8).

9. Trdo tesnilo. To je nenavadna vrsta povezave, saj togo tesnilo poleg preprečevanja gibanja v ravnini XOY preprečuje vrtenje palice (nosilca) glede na konico A. Zato se reakcija sklopitve zmanjša le na reakcijo R (R a x, Ra y), temveč tudi na reaktivni moment M pa (slika 2.9).
Telesa v naravi so prosta in nesvobodna. Telesa, katerih svoboda gibanja ni omejena z ničemer, se imenujejo svobodna. Telesa, ki omejujejo svobodo gibanja drugih teles, se v zvezi z njimi imenujejo povezave.
Ena od glavnih določb mehanike je načelo osvoboditve od vezi, po katerem lahko nesvobodno telo štejemo za prosto, če vezi, ki delujejo nanj, zavržemo in nadomestimo s silami - reakcijami vezi.
Zelo pomembno je pravilno postaviti vezne reakcije, sicer bodo zapisane enačbe napačne. Spodaj so primeri zamenjave vezi z njihovimi reakcijami. Slike 1.1–1.8 prikazujejo primere zamenjave sil v ravnini z reakcijami.

a – telo z maso G na gladki podlagi;
b – delovanje površine nadomesti reakcija – sila R;
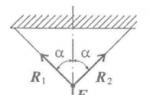
c – v točki A je povezava »referenčna točka« ali rob;
d – reakcije so usmerjene pravokotno
podprta ali podprta letala
Slika 1.1
Reakcija gladke površine je vedno usmerjena pravokotno na to površino (slika 1.1). Reakcija "breztežnega" kabla (nit, veriga, palica) je vedno usmerjena vzdolž kabla (nit, veriga, palica) (slika 1.2).


Slika 1.6
Slika 1.7a prikazuje dvojno drsno tesnilo. V ravnini ta nosilec omogoča translacijsko gibanje palice tako vodoravno kot navpično, vendar preprečuje vrtenje (v ravnini). Odziv takšne podpore bo trenutek M C(Slika 1.7, b).

Slika 1.7
Konzola (slepa ali toga vgradnja) ne dopušča premikanja dela. Reakcija takšne podpore je sila neznane velikosti in smeri R A s kotom α (oz X A in Y A) in trenutek M A(Slika 1.8).

Slika 1.8
Slike 1.9 – 1.15 prikazujejo primere zamenjave sil v prostoru z njihovimi reakcijami.
Zgibno-fiksna podpora ali sferični tečaj (slika 1.9, a) se nadomesti s sistemom sil (slika 1.9, b) X A, Y A in Z A, tj. sila neznane velikosti in smeri.

Vsi izreki in enačbe statike izhajajo iz več začetnih določb, sprejetih brez matematičnega dokaza in imenovanih aksiomi ali načela statike. Aksiomi statike so rezultat posplošitev številnih poskusov in opazovanj ravnotežja in gibanja teles, ki jih praksa vedno znova potrjuje. Nekateri od teh aksiomov so posledice osnovnih zakonov mehanike, s katerimi se bomo seznanili v dinamiki.
Aksiom 1.Če na prosto absolutno togo telo delujeta dve sili, je telo lahko v ravnovesju, če in samo če sta ti sili enaki po velikosti ( F 1 = F 2) in so usmerjeni vzdolž ene ravne črte v nasprotnih smereh (slika 10).
Sl.10
Aksiom 1 določa najenostavnejši uravnotežen sistem sil, saj izkušnje kažejo, da prosto telo, na katerega deluje samo ena sila, ne more biti v ravnovesju.
Aksiom 2. Delovanje danega sistema sil na absolutno togo telo se ne bo spremenilo, če mu dodamo ali odvzamemo uravnotežen sistem sil.
Ta aksiom določa, da sta dva sistema sil, ki se razlikujeta po uravnoteženem sistemu, enaka drugemu.
Posledica 1. in 2. aksioma. Delovanje sile na absolutno togo telo se ne spremeni, če točko delovanja sile premaknemo vzdolž njene linije delovanja na katero koli drugo točko telesa.
Sl.11
Pravzaprav naj na togo telo deluje sila v točki A moč (slika 11). Vzemimo poljubno točko na liniji delovanja te sile IN in nanj delujeta dve uravnoteženi sili in , tako da je = , = . To ne bo spremenilo učinka sile na telo. Toda po aksiomu 1 tudi sile tvorijo uravnotežen sistem, ki ga je mogoče zavrniti. Kot rezultat, na telesu. Delovala bo samo ena sila, ki je enaka, vendar deluje v točki IN.
Tako lahko vektor, ki predstavlja silo, velja za uporabljenega na kateri koli točki na liniji delovanja sile (tak vektor se imenuje drsenje).
Aksiom 3(aksiom paralelograma sil). Dve sili, ki delujeta na telo v eni točki, imata rezultanto, ki deluje v isti točki in je predstavljena z diagonalo paralelograma, zgrajenega na teh silah, kot na straneh.
Vektor, ki je enak diagonali paralelograma, sestavljenega iz vektorjev in (slika 12), se imenuje geometrijska vsota vektorjev in: = +.
Slika 12
Velikost rezultante
|
Seveda bo taka enakost upoštevana le pod pogojem, da so te sile usmerjene vzdolž ene ravne črte v eno smer. Če se izkaže, da so vektorji sil pravokotni, potem
Posledično lahko aksiom 3 formuliramo tudi takole: dve sili, ki delujeta na telo v eni točki, imata rezultanto, ki je enaka geometrijski (vektorski) vsoti teh sil in delujeta v isti točki.
Aksiom 4. Pri vsakem delovanju enega materialnega telesa na drugega pride do reakcije enake velikosti, vendar nasprotne smeri.
Zakon enakosti akcije in reakcije je eden od osnovnih zakonov mehanike. Iz tega sledi, da če telo A deluje na telo B s silo, nato pa hkrati telo IN vpliva na telo A z enako velikostjo in silo, usmerjeno vzdolž iste ravne črte, vendar v nasprotni smeri = (slika 13). Vendar pa sile ne tvorijo uravnoteženega sistema sil, saj delujejo na različna telesa.
Slika 13
Aksiom 5(načelo strjevanja). Ravnotežje spremenljivega (deformabilnega) telesa pod vplivom danega sistema sil ne bo moteno, če se telo šteje za utrjeno (popolnoma trdno).
Trditev, izražena v tem aksiomu, je očitna. Na primer, jasno je, da ravnotežje verige ne bo moteno, če se njeni členi štejejo za varjene drug z drugim itd.
Povezave in njihove reakcije.
Po definiciji imenujemo telo, ki ni vezano na druga telesa in se lahko iz določenega položaja premika v prostoru. prost(na primer balon v zraku). Telo, ki mu gibanje v prostoru onemogočajo druga telesa, ki so pritrjena ali v stiku z njim, se imenuje nesvoboden. Vse, kar omejuje gibanje danega telesa v prostoru, bomo imenovali zveza.
Na primer, telo, ki leži na mizi, je neprosto telo. Njena povezava je ravnina mize, ki preprečuje premikanje telesa navzdol.
Tako imenovani načelo osvoboditve, ki ga bomo uporabljali v prihodnje. Napisano je takole.
Vsako neprosto telo lahko osvobodimo, če odstranimo povezave in njihovo delovanje na telo nadomestimo s silami, tako da telo ostane v ravnotežju.
Sila, s katero določena povezava deluje na telo in preprečuje eno ali drugo njegovo gibanje, se imenuje reakcijska (proti) sila povezave ali preprosto reakcija povezave.
Torej ima telo, ki leži na mizi, povezavo – mizo. Telo ni svobodno. Naredimo jo prosto - odstranimo mizo in da bo telo ostalo v ravnotežju, zamenjamo mizo s silo, usmerjeno navzgor in seveda enako teži telesa.
Reakcija povezave je usmerjena v nasprotno smer od tiste, v kateri povezava ne dopušča premikanja telesa. Kadar povezava hkrati onemogoča gibanje telesa v več smereh, je tudi smer reakcije povezave vnaprej neznana in jo je treba določiti kot rezultat reševanja obravnavanega problema.
Razmislimo, kako so usmerjene reakcije nekaterih osnovnih vrst vezi.
1. Gladka ravnina (površina) ali podpora. Gladko površino bomo imenovali trenje, ob katerem lahko dano telo v prvem približku zanemarimo. Takšna površina preprečuje, da bi se telo premikalo samo v smeri skupne pravokotnice (normale) na površine dotikajočih se teles na mestu njihovega stika (sl. 14, A). Zato reakcija n gladka površina ali nosilec je usmerjen vzdolž skupne normale na površine dotikajočih se teles na točki njihovega stika in se uporablja na tej točki. Ko je ena od kontaktnih površin točka (slika 14, b), potem je reakcija usmerjena normalno na drugo površino.
Če površine niso gladke, je treba dodati še eno silo - silo trenja, ki je usmerjena pravokotno na normalno reakcijo v smeri, nasprotni možnemu drsenju telesa.
Sl.14 Sl.15
Slika 16
2. Navoj. Povezava, izdelana v obliki prožne, neraztegljive niti (slika 15), ne daje telesu M odmaknite se od točke obešanja niti v smeri A.M.. Zato reakcija T napeta nit je usmerjena vzdolž niti iz telesa do točke njegove prekinitve. Tudi če lahko vnaprej ugibate, da je reakcija usmerjena proti telesu, jo je treba še vedno usmeriti stran od telesa. To je pravilo. Odpravlja nepotrebne in nepotrebne predpostavke in, kot bomo videli kasneje, pomaga ugotoviti, ali je palica stisnjena ali raztegnjena.
3. Cilindrični spoj (ležaj). Če sta dve telesi povezani s sornikom, ki poteka skozi luknje v teh telesih, se taka povezava imenuje tečaj ali preprosto tečaj; Središčna črta sornika se imenuje os tečaja. Telo AB, pritrjen s tečajem na nosilec D(Slika 16, A), se lahko po želji vrti okoli osi tečaja (v risalni ravnini); to je konec A telo se ne more premakniti v nobeno smer pravokotno na os tečaja. Zato reakcija R cilindrični tečaj ima lahko katero koli smer v ravnini, ki je pravokotna na os tečaja, tj. v letalu A hu. Za moč R v tem primeru niti njegov modul ni vnaprej znan R, niti smeri (kota).
4. Kroglični zglob in potisni ležaj. Ta vrsta povezave fiksira določeno točko telesa, tako da se ne more premikati v prostoru. Primeri takih povezav so kroglična peta, s katero je fotoaparat pritrjen na stojalo (slika 16, b) in ležaj s potiskom (potisk) (slika 16, V). Reakcija R kroglični zglob ali potisni ležaj ima lahko katero koli smer v prostoru. Zanjo niti reakcijski modul ni vnaprej znan R, niti kotov, ki jih tvori z osemi x, y, z.
Slika 17
5. Palica. Naj bo povezava v neki strukturi palica AB, na koncih pritrjen s tečaji (slika 17). Predpostavimo, da lahko težo palice zanemarimo v primerjavi z obremenitvijo, ki jo zaznava. Potem bosta na palico delovali le dve sili, ki delujeta na tečajih A in IN. Če pa je palica AB je v ravnovesju, potem se v skladu z aksiomom 1 uporablja v točkah A in IN sile morajo biti usmerjene vzdolž ene ravne črte, to je vzdolž osi palice. Posledično palica, obremenjena na koncih, katere težo lahko zanemarimo v primerjavi s temi obremenitvami, deluje samo na napetost ali stiskanje. Če je taka palica povezava, bo reakcija palice usmerjena vzdolž osi palice.
6. Premična zgibna podpora (slika 18, podpora A) preprečuje premikanje telesa samo v smeri, ki je pravokotna na drsno ravnino nosilca. Reakcija takega nosilca je usmerjena normalno na površino, na kateri ležijo valji gibljivega nosilca.
7. Fiksna zgibna podpora (slika 18, podpora IN). Reakcija takšne podpore poteka skozi os tečaja in ima lahko katero koli smer v ravnini risbe. Pri reševanju nalog bomo reakcijo upodabljali po komponentah in po smereh koordinatnih osi. Če po rešitvi problema najdemo in , potem bo določena tudi reakcija; modulo
Slika 18
Način pritrditve, prikazan na sliki 18, se uporablja tako, da v žarku AB ob spremembi njegove dolžine zaradi temperaturnih sprememb ali upogibanja niso nastale dodatne napetosti.
Upoštevajte, da če podpora AČe tudi žarek (slika 18) naredimo negibnega, potem bo žarek, ko nanj deluje katerikoli ravninski sistem sil, statično nedoločen, saj bodo tedaj tri ravnotežne enačbe vključevale štiri neznane reakcije , , , .
8. Fiksna opora za stiskanje ali togo vstavljanje (slika 19). V tem primeru deluje sistem porazdeljenih reakcijskih sil na vgrajeni konec nosilca s strani nosilnih ravnin. Ob upoštevanju teh sil, ki jih je treba pripeljati v središče A
Včasih morate preučiti ravnovesje netrogih teles. V tem primeru bomo uporabili predpostavko, da če je to netogo telo v ravnovesju pod delovanjem sil, potem ga lahko obravnavamo kot trdno telo z uporabo vseh pravil in metod statike.
Telesa, obravnavana v mehaniki, so lahko prost in ni zastonj.
prost imenovano telo, ki ne doživlja nobenih ovir premikati se v prostoru kaj smer. Če telo povezan z drugimi telesi, ki omejitev njegovo gibanje v eno ali več smeri, potem je nesvoboden.
Telesa, ki omejitev imenujemo gibanje obravnavanega telesa povezave.
Kot rezultat interakcije med telesom in njegovimi povezavami nastanejo moč, preprečevanje morebitnih telesnih gibov. Te sile delujejo na telo s strani povezav in se imenujejo reakcije povezave.
Komunikacijski odziv vedno nasprotje smer, v katero je povezava preprečuje gibanje telesa.
Določanje reakcij vezi je eden najpomembnejših problemov v statiki. Spodaj so najbolj pogost vrste povezav, ki jih najdemo v mehaniki.
Komunikacija v obliki gladka(tj. brez upoštevanja tornih sil) ravnine ali površine (sl. a, b ). V tem primeru reakcija komunikacija je vedno usmerjena normalno na referenčno površino.
Komunikacija v obliki grobo letalo (sl. V ). Tukaj se pojavi dva sestavine reakcije: normalno n , pravokotna na ravnino, in tangenta T , ki leži v letalu. Tangentna reakcija T klical sila trenja in vedno usmerjena vstran, nasprotno dejansko ali možno gibanje telesa.
Popolna reakcija R , enaka geometrijski vsoti normalne in tangencialne komponente
R = N + T , odstopa od normale na podporno površino za določen kot ρ .
Ko telo sodeluje z resnično nastanejo povezave sile trenja. Vendar pa v mnogih primerih sile trenja nepomemben in posledično pogosto zanemarjen, torej štejejo povezave popolnoma gladko.
Povezave, v katerem brez tornih sil, poklical idealno. Zgornje razmerje v obliki gladka ravnina ali površina spada v kategorijo idealno.
Prilagodljiv povezava z vrvjo, kablom, verigo itd. (sl. G ). Reakcija fleksibilne povezave je usmerjena skupaj komunikacije in prilagodljive komunikacije lahko delujejo samo za napetost.
Komunikacija v obliki toga palica z zgibnimi konci(riž. d ). Tu so reakcije, kot tudi v fleksibilni povezavi, vedno usmerjene vzdolž osi palic, lahko pa so palice tako raztegnjena kot stisnjena.
Komunikacija izvedena rob diedrski kot ali točka podporo(riž. e ). Reakcija takšne povezave je usmerjena pravokotno površino podprtega telesa, če je to površino mogoče upoštevati gladka.
Obstoj veznih reakcij je utemeljen. Za določitev reakcij vezi uporabite tehniko osvoboditev od povezav.
To je trik. Ne da bi spremenili ravnovesje telesa ali sistema teles, lahko vsako povezavo, ki je vsiljena sistemu, zavržemo in jo nadomestimo z delovanjem reakcije zavržene povezave.
Povezave in reakcije povezav
Telo se imenuje prost, če njegovo gibanje v prostoru ni z ničemer omejeno. V nasprotnem primeru se telo imenuje nesvoboden, telesa, ki omejujejo gibanje danega telesa, pa so ¾ povezave. Sile, s katerimi vezi delujejo na dano telo, se imenujejo reakcije povezav .
Glavne vrste povezav in njihove reakcije:
Gladka površina(brez trenja):Reakcija gladke površine je usmerjena normalno na to površino (pravokotno na skupno tangento).
 Sidrišče (rob):
Sidrišče (rob):
Reakcija poteka pravokotno na podporno površino.
3. Popolna nit(prilagodljivo, breztežno, neraztegljivo):
 Primeri: modelira kabel, vrv, verigo, pas,...
Primeri: modelira kabel, vrv, verigo, pas,... Reakcija idealne niti je usmerjena vzdolž niti do obešalne točke.
4. Idealna palica(toga, breztežna palica s tečaji na koncih):
 |
Reakcija sklopitve je usmerjena vzdolž palice.
Za razliko od niti lahko palica deluje tudi pod pritiskom.
5. Cilindrični spoj:
Ta povezava omogoča telesu, da se premika vzdolž osi in vrti okoli osi tečaja, vendar ne dovoljuje, da se pritrdilna točka premika v ravnini, ki je pravokotna na os tečaja. Reakcija leži v ravnini, ki je pravokotna na os tečaja in poteka skozi njo. Položaj te reakcije ni določen, lahko pa jo predstavimo z dvema med seboj pravokotnima komponentama
7. Aksialni ležaj:
Reakcija te povezave je nastavljena podobno kot v prejšnjem primeru.8. Trda prekinitev:
Ta povezava preprečuje premikanje in vrtenje okoli sidrne točke. Stik telesa s povezavo poteka vzdolž površine. Imamo porazdeljen sistem reakcijskih sil, ki ga, kot bo prikazano, lahko nadomestimo z eno silo in parom sil.