Osnovne reakcije mehanskih zvez. Povezave in reakcije povezav
Povezave in reakcije povezav
Za prosto togo telo veljajo vsi zakoni in izreki statike.
Vsa telesa delimo na prosta in vezana.
Prosta telesa so telesa, katerih gibanje ni omejeno.
Vezana telesa so telesa, katerih gibanje je omejeno z drugimi telesi.
Telesa, ki omejujejo gibanje druga telesa se imenujejopovezave.
Imenujemo sile, ki delujejo iz povezav in preprečujejo gibanjereakcije povezav.
Komunikacijska reakcija je vedno usmerjena s stranikamor ne moreš.
Vsako vezano telo si lahko predstavljamo kot prosto, če vezi nadomestimo z reakcijami (načelo osvobajanja od vezi).
Vse povezave lahko razdelimo na več vrst.
Povezava - gladka podpora (brez trenja)
Slika 1
Reakcija opore se izvaja na točki opore in je vedno usmerjena pravokotno na oporo (slika 1).
Fleksibilna komunikacija
(nit, vrv, kabel, veriga) Breme je obešeno na dveh nitih (slika 2).
Slika 2
Trda palica
Na diagramih so palice upodobljene kot debela polna črta (slika 3).

Slika 3
Palica je lahko stisnjena ali raztegnjena. Reakcija palice je usmerjena vzdolž palice. Palica deluje na napetost ali stiskanje. Natančno smer reakcije določimo tako, da miselno odstranimo palico in razmislimo o možnih gibih telesa brez te povezave.
Možna selitev točka je tako infinitezimalno miselno gibanje, ki ga v danem trenutku dovoljujejo povezave, ki so ji vsiljene.
Palico 1 odstranimo, v tem primeru palica 2 pade. Zato je sila iz palice 1 (reakcija) usmerjena navzgor. Odstranimo palico 2. V tem primeru točkaA pade in se odmika od stene. Posledično je reakcija palice 2 usmerjena proti steni.
Zgibna podpora
Tečaj omogoča vrtenje okoli pritrdilne točke. Obstajata dve vrsti tečajev.
Premični sklep
Palica, pritrjena na tečaj, se lahko vrti okoli tečaja, pritrdilna točka pa se lahko premika vzdolž vodila (ploščadi) (slika 4).

Slika 4
Reakcija gibljivega tečaja je usmerjena pravokotno na nosilno površino, saj samo premikanje po nosilni površini ni dovoljeno.
Fiksni tečaj
Pritrdilne točke ni mogoče premakniti. Palica se lahko prosto vrti okoli osi tečaja. Reakcija takšne podpore poteka skozi os tečaja, vendar je smer neznana. Običajno je prikazan kot dve komponenti: vodoravna in navpična( Rx ; R y) (slika 5).
Slika 5
Ščipanje ali "zapiranje"
Kakršen koli premik pritrdilne točke ni mogoč.
Pod vplivom zunanjih sil se v nosilcu pojavita reaktivna sila in reaktivni moment M R , ki preprečuje vrtenje (slika 6).
Slika 6
Reaktivna sila je običajno predstavljena kot dve komponenti vzdolž koordinatnih osi![]()
Primeri reševanja problemov
Primer 1. Breme je obešeno na palice in vrvi ter je v ravnovesju (slika 7). Nariši sistem sil, ki delujejo na tečajA.

Slika 7
rešitev
1. Reakcije palic so usmerjene vzdolž palic, reakcije gibkih povezav so usmerjene vzdolž navojev v smeri napetosti (slika 7a).
2. Da bi določili natančno smer sil v palicah, zaporedno odstranimo palici 1 in 2. Analiziramo možna gibanja koniceA.
Ne upoštevamo mirujočega bloka, na katerega delujejo sile.
3. Odstranite palico 1, točkoA dvigne in se odmakne od stene, zato je reakcija palice 1 usmerjena proti steni.
4. Odstranite palico 2, točkoA dvigne in se približa steni, zato je reakcija palice 2 usmerjena od stene navzdol.
5. Vrv vleče v desno.
6. Osvobodite se povezav (slika 7b).
Primer 2. Krogla je obešena na nit in pritrjena na steno (slika 8a). Določite reakcije niti in gladkega nosilca (stene).

Slika 8
rešitev
1. Reakcija niti - vzdolž niti do točkeIN navzgor (slika 8b).
2. Reakcija gladke podpore (stene) - normalno na podlago.
Testna vprašanja in naloge
4. Navedite možno smer reakcij vpodpira(slika 9).

Slika 9
1. Gladka (brez trenja) ravnina ali površina. Takšne povezave preprečujejo, da bi se telo gibalo le v smeri skupne normale na dotični točki, po kateri bo usmerjena ustrezna reakcija. Zato je reakcija gladke ploščate opore pravokotna na to oporo (reakcija na sliki 12,a); reakcija gladke stene je pravokotna na to steno sl. 12, b); reakcija gladke površine je usmerjena vzdolž normale na to površino, narisane na točki stika na sl. 12, c).

2. Ostra štrlina. V tem primeru lahko domnevamo, da je štrlina sama podprta, zadevno telo pa služi kot opora. To vodi do primera 1 in zaključka, da je reakcija gladke štrline usmerjena normalno na površino nosilnega telesa (sila na sliki 12, c).
3. Fleksibilna povezava (breztežna nit, kabel, veriga itd.). Ustrezna reakcija je usmerjena vzdolž povezave od točke pritrditve niti do točke vzmetenja (sila na sliki 11, d, sila na sliki 12, b).
4. Breztežna ravna palica s tečaji na koncih. Reakcija je usmerjena vzdolž palice. Ker je palica lahko stisnjena ali raztegnjena, je lahko reakcija usmerjena tako proti točki vzmetenja palice kot stran od točke vzmetenja (reakcije na sliki 13, a).
5. Breztežnostna zakrivljena ali ukrivljena palica. Reakcija je usmerjena vzdolž ravne črte, ki poteka skozi središča končnih tečajev (sila 53 na sliki 13, a; sila S na sliki 13, b).

6. Premična podpora za tečaje. Reakcija je usmerjena pravokotno na podporno ravnino (kotalna ravnina) (slika 14, a, b).

7. Cilindrični tečaj (slika 15, a), radialni ležaj (slika 15, b). Reakcija poteka skozi središče tečaja (središče srednjega dela ležaja) in leži v ravnini, pravokotni na os tečaja (ležaja).
Enakovredno je dvema silama neznane velikosti - komponentam te reakcije vzdolž ustreznih koordinatnih osi (sile na sliki 15, a; in na sliki 15, b). (Za razlago tega glejte tudi primer na strani 16).


8. Sferični tečaj (slika 16, a), potisni ležaj (ali kotni ležaj) (slika 16, b). Reakcija je sestavljena iz treh po velikosti neznanih sil - komponent reakcije vzdolž osi prostorskega koordinatnega sistema.
9. Trdo tesnilo (slika 17). Ko na telo deluje ravninski sistem sil, je skupna reakcija vgradnje sestavljena iz sile s komponentama XA in UA ter para sil z momentom M, ki se nahajajo v isti ravnini kot delujoče sile.
10. Drsno tesnilo (slika 18). V primeru ravninskega sistema sil in odsotnosti trenja je reakcija sestavljena iz sile N in para sil z momentom M, ki se nahajajo v isti ravnini kot delujoče sile. Sila N je pravokotna na smer drsenja.



Vprašanja za samotestiranje
1. Kaj imenujemo absolutno togo telo, materialna točka?
2. Prepoznajte elemente sile. Na kakšen način lahko nastavite silo?
3. Kaj imenujemo vektorski moment sile glede na točko. Kaj je algebraični moment sile?
4. V katerem primeru je moment sile glede na točko enak nič?
5. Kaj imenujemo sistem sil? Katere sisteme sil imenujemo enakovredni?
6. Kaj imenujemo rezultantni sistem sil?
7. Definirajte neprosto trdno snov, vez, vezno reakcijo?
8. Ali lahko nesvobodno telo štejemo za prosto?
9. Na kateri dve skupini delimo sile, ki delujejo na neprosto togo telo?
Vsako prosto telo v vesolju ima šest prostostnih stopenj: lahko se giblje vzdolž treh osi in vrti okoli teh osi. Telesa so redko v prostem stanju, v večini primerov je njihovo gibanje omejeno s povezavami. Omejitve so omejitve, ki izključujejo možnost gibanja telesa v določeni smeri. Če na nepremično telo delujejo aktivne sile, se v povezavah pojavijo reaktivne sile ali reakcije, ki dopolnjujejo sistem aktivnih sil v ravnotežni. Kombinacija aktivnih in reaktivnih uravnoteženih sil določa obremenjeno stanje telesa in njegovo deformacijo.
Reakcije vezi najdemo z uporabo ravnotežnih enačb. V tem primeru se odločitev izvede po naslednjem načrtu:
- prepoznati zunanje aktivne sile, ki delujejo na izbrano telo ali skupino teles;
- izbrani predmet (telo) se osvobodi vezi in namesto tega se uporabijo reakcijske sile vezi;
- Po izbiri koordinatnih osi sestavijo ravnotežne enačbe in po njihovi rešitvi poiščejo reakcijske sile vezi.
Za prostorski sistem sil je mogoče sestaviti šest ravnotežnih enačb (13.7). S pomočjo teh enačb je določenih šest neznanih reakcij.
Problemi, ki jih je mogoče rešiti samo z enačbami statičnega ravnotežja, se imenujejo statično določljiv.Če je izbranemu objektu naloženo večje število povezav, postane naloga statično nedoločen in za njeno rešitev je poleg ravnotežnih enačb potrebno uporabiti še dodatne enačbe, sestavljene na podlagi deformacijske analize. Na splošno lahko pritrditev ali povezava dveh delov odpravi od ene do šest prostostnih stopenj, tj. naloži od ene do šest povezav. V skladu s tem se lahko pri konsolidaciji pojavi od ena do šest reakcij. Količina reaktivnih sil in njihova smer sta odvisni od narave povezav.
Tukaj so najpogostejše vrste pritrdilnih in povezovalnih delov.
- 1. Povezave, ki izključujejo možnost gibanja samo v eno smer. V takšnih spojinah poteka samo ena reakcija določene smeri. Povezave te vrste vključujejo:
- a) povezava z dotikom dveh teles v točki ali vzdolž črte. Ob dotiku pride do reakcije, usmerjene vzdolž splošne normale na dotične površine (slika 13.5). Takšna povezava se imenuje zglobno-premična;
riž. 13.5.
- b) povezava s kablom, nitjo, verigo povzroči reakcijo, usmerjeno vzdolž prožne povezave, in taka povezava lahko deluje le v napetosti (glej sliko 13.5, b);
- c) povezava v obliki toge ravne palice z zgibnimi konci daje tudi reakcijo, usmerjeno vzdolž osi palice (glej sliko 13.5, mačka vendar lahko deluje tako v napetosti kot v stiskanju.

riž. 13.6.
Na sl. 13,5, G telo je prikazano s tremi omejitvami; vsaka povezava izključuje možnost gibanja v eno smer in daje eno reakcijo, katere smer je znana.
- 2. Pritrditev ali povezava, ki izključuje gibanje v dveh smereh in s tem daje dve reakciji, se imenuje tečajno-fiksna podpora ali cilindrični tečaj (slika 13.6).
- 3. Povezava, ki izključuje gibanje v treh smereh in daje tri reakcije, se imenuje prostorski ali kroglični sklep (slika 13.7).
- 4. Pritrjevanje, ki izključuje vseh šest prostostnih stopenj, se imenuje togo pritrjevanje ali vdelava. V vgradnji lahko nastane šest faktorjev reaktivne sile - tri reaktivne sile in trije reaktivni momenti (slika 13.8). Ko sile, ki se nahajajo v eni ravnini, delujejo na telo s togo vgradnjo, nastaneta v vgradnji dve reaktivni sili in en reaktivni moment.

riž. 13.7.

riž. 13.8.
Pri izračunih so nosilci shematizirani in pogojno razdeljeni v tri glavne skupine:
- zgibni in premični(slika 13.9, A), zaznavanje samo ene linearne reakcije /?;
- zgibno-fiksen(Sl. 13.9, b), ki zaznava dve linearni reakciji R in n.
- ščipanje, oz tesnjenje(slika 13.9, V), zaznavanje linearnih reakcij R in n in trenutek M.

riž. 13.9.
Pri stiku resničnih teles in med njihovim relativnim gibanjem nastanejo na mestih njihovega stika sile trenja, ki jih lahko štejemo za posebno vrsto reaktivnih sil. Sila trenja se nahaja v ravnini stika teles; pri gibanju je usmerjena v nasprotno smer od relativne hitrosti telesa.
Primer. Gred 1 z nanjo pritrjenim zobnikom 2 je nameščena v dveh ležajih A in IN. Jermenica 3 je nameščena na prostem koncu gredi (sl. 13.10). Geometrijske dimenzije so znane. A, s, prenosni navor M, premer jermenice D, vsi parametri stožčastega zobnika, kot tudi razmerje sil napetosti jermena F a JF al= 2. Potrebno je določiti reakcijo nosilcev in natezno silo pasu.

riž. 13.10.
Rešitev izvedemo v treh korakih.
1. Identificiramo aktivne sile, ki delujejo v sistemu. Prostorsko nameščena sila deluje na stožčasti zobnik, katerega komponente vzdolž koordinatnih osi so ustrezno označene F v F r in F a . Komponenta F ( , imenovana obodna sila, je določena z danim navorom na podlagi enačbe momentov okoli osi z

Radialna komponenta F r in aksialna komponenta F a določena z obodno silo F ( na podlagi podane geometrije stožčastega zobnika.
2. Gred (ravnotežni objekt) osvobodimo povezav in namesto tega uporabimo reakcijske sile X l U l, X c, Y B Z B .
Ležaji A in IN je treba obravnavati kot zgibne opore, saj imajo vedno vrzeli. V podporo A pride do dveh reakcij X l in u l, saj ta podpora prepoveduje premikanje gredi samo v prečnih smereh. V desni podpori pride do treh reakcij X noter, U noter in Z B, saj omejuje gibanje gredi tudi v aksialni smeri. Aktivne in reaktivne sile skupaj tvorijo prostorski sistem uravnoteženih sil.
3. Izberite koordinatni sistem: osi X in pri postavljen v ravnino, pravokotno na os gredi, in os z usmerjamo vzdolž osi gredi. Ustvarimo šest ravnotežnih enačb z uporabo (13.7) in (13.8).

Uporaba danega stanja F al = 2F ii2 in z reševanjem ravnotežnih enačb najdemo sile F aV F a2 in reakcije podpore
Eden od temeljnih konceptov mehanike je koncept mehanskega sistema. Mehanski sistem razumemo kot niz končnega ali neskončnega števila materialnih točk (ali teles), ki medsebojno delujejo v skladu s tretjim Newtonovim zakonom. Iz tega sledi, da je gibanje posamezne točke (ali telesa) sistema odvisno tako od položaja kot tudi od gibanja preostalih točk obravnavanega mehanskega sistema.
Sisteme ločimo na proste in nesvobodne. Sistem se imenuje prost, če lahko vse točke, ki so v njem, zasedejo poljubne položaje in imajo poljubne hitrosti. V nasprotnem primeru, ko materialne točke, vključene v sistem, ne morejo zasedati poljubnih položajev ali ne morejo imeti poljubnih hitrosti, sistem imenujemo neprost.
Primer prostega mehanskega sistema je sončni sistem, v katerem lahko Sonce in planete obravnavamo kot materialna telesa pod medsebojnim delovanjem Newtonovih gravitacijskih sil.
Primer neprostega sistema je sistem, sestavljen iz točk, od katerih ena oz
Nekateri so med gibanjem prisiljeni ostati na nekaterih črtah ali površinah.
S to delitvijo sistemov na proste in nesvobodne je povezan koncept komunikacije.
V mehaniki sklopitev razumemo kot pogoje, ki omejujejo svobodo gibanja točk v sistemu. Povezave lahko naložijo omejitve tako glede položaja točk kot njihove hitrosti. V praksi se povezave izvajajo z materialnimi telesi ali napravami (palice, navoji, tečaji itd.).
Tako kot sile, ki delujejo na točke sistema, delimo na notranje sile in zunanje sile, tako lahko povezave, ki delujejo na točke sistema, delimo na notranje povezave in zunanje povezave. Z notranjimi povezavami razumemo tiste povezave, ki na točkah sistema ne preprečujejo prostega gibanja sistema po nenadni strditvi. Povezava, ki nima te lastnosti, se imenuje zunanja. Na primer, če sta dve točki trdnega telesa med seboj povezani z neraztegljivo in breztežno palico, bo taka povezava notranja. Tako lahko trdno telo obravnavamo kot sistem, ki je predmet notranjih povezav. Če je ena od točk togega telesa tečajna, bo v tem primeru povezava zunanja.
Sistem, ki je podvržen le notranjim povezavam, je prost, saj se lahko giblje kot prosto togo telo. Če so med povezavami na točkah sistema zunanje povezave, potem sistem ni prost.
Pogoji, ki omejujejo svobodo gibanja točk sistema, so analitično izraženi v obliki enačb ali neenakosti oblike.
kjer je čas, so koordinate oziroma hitrosti sistemske točke,
se nanaša na nek inercialni referenčni sistem, glede na katerega se upošteva gibanje tega sistema.
Povezave ločimo na zadrževalne in nezadrževalne; Prvi ustreza znaku enačbe v (1.1), drugi pa znaku neenakosti.
Zadrževalne in nevsebujoče povezave se včasih imenujejo dvosmerne oziroma enosmerne povezave. Zadrževalni člen, ki preprečuje gibanje v eno smer, hkrati preprečuje gibanje v nasprotni smeri. Nezadrževalni člen preprečuje gibanje v eno smer, ne preprečuje pa gibanja v nasprotni smeri.
Primer držalne povezave bi bili dve vzporedni ravnini, med katerima se giblje žoga. Če srednjo ravnino med njima obravnavamo kot koordinatno ravnino, dobimo enačbo omejitve v obliki: Če se žogica kadar koli premika po vodoravni ravnini in jo lahko zapusti, potem bo ta ravnina nezadrževalna omejitev. Pogoj za takšno povezavo bo izražen z neenakostjo (ali ).
Drug primer nezadržne kravate je vrvica s kroglico na koncu. Če vzamemo visečo točko niti za izhodišče koordinat in menimo, da je nit neraztegljiva, lahko pogoj te povezave zapišemo v obliki neenakosti
kjer so koordinate krogle in je dolžina niti.
Če je med gibanjem žogice neenakost izpolnjena
to pomeni, da je nit zrahljana in kroglica osvobojena povezave.
Če je, ko se žogica premika, enakost
potem to pomeni, da je nit napeta in povezava deluje na kroglo.
Glede na to, ali sklopitvena enačba izrecno vsebuje čas ali ne, sklopitve delimo na nestacionarne (reonomske) in stacionarne (skleronomske).
Povezave, ki postavljajo omejitve le na položaje točk v sistemu, se imenujejo končne ali geometrijske; analitično so izražene z enačbo
Tukaj in v nadaljevanju predpostavljamo, da povezave držijo.
Če povezave nalagajo omejitve ne samo na položaje točk, ampak tudi na njihove hitrosti, potem se imenujejo diferencialne ali kinematične, njihov analitični izraz pa ima obliko
Povezave delimo tudi na holonomne in neholonomne. Holonomne povezave vključujejo vse končne ali geometrijske povezave oblike (1.2), torej vse povezave, ki postavljajo omejitve na možne položaje točk v sistemu. Med holonomske povezave sodijo tudi diferencialne povezave, ki jih z integracijo zreduciramo na relacije oblike (1.2):

kje so nekatere funkcije koordinat, morda časa.
Če diferencialnih povezav oblike (1.4) z integracijo ni mogoče reducirati na končne relacije oblike (1.2), jih imenujemo
neholonomna ali neintegrabilna. G. Hertz je opozoril na pomen razlikovanja med holonomnimi in neholonomnimi povezavami za koncept virtualnega gibanja sistema.
Preprosto je videti, da če holonomske omejitve nalagajo omejitve na možne položaje točk v sistemu, potem neholonomske omejitve nalagajo omejitve na hitrosti točk v sistemu. To izhaja iz dejstva, da lahko neholonomno povezovalno enačbo (1.4) vedno predstavimo v naslednji obliki:

Mehanski sistemi, za katere veljajo holonomske omejitve, se imenujejo holonomni sistemi. Če so med povezavami neholonomne, se sistemi imenujejo neholonomni.
Če so sistemu naložene samo neholonomne omejitve, se tak sistem imenuje popolnoma neholonomski ali pravilno neholonomski.
Klasičen primer gibanja neholonomnega sistema je kotaljenje polne krogle po hrapavi ravnini (na primer gibanje biljardne krogle).
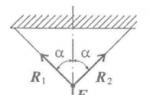
Pustite, da se kotali trdna krogla s polmerom, ne da bi zdrsnila po absolutno grobi ravnini. Vzemimo dva koordinatna sistema s skupnim izhodiščem v središču krogle C. Eden od njiju (sistem) naj se giblje translatorno, drugi (sistem) pa naj bo togo povezan s kroglo (slika 1).
Položaj krogle v vsakem trenutku lahko določimo s petimi koordinatami: dvema koordinatama središča krogle (tretja koordinata) in tremi Eulerjevimi koti: precesijskim kotom, nutacijskim kotom 0 in kotom pravilne rotacije (slika 1). Pogoj povezave v obravnavanem problemu je pogoj dotika kroglice ravnine in inverzije
na ničelno hitrost točke A, ki se dotika žogice. Če vzamemo središče krogle C za pol in njegovo hitrost označimo s trenutno kotno hitrostjo vrtenja krogle - skozi , in vektorski radij, narisan od središča krogle do točke dotika - skozi , lahko zapišemo hitrost točke A v naslednji obliki:

Če projiciramo to vektorsko enakost na koordinatno os in izpolnimo pogoj povezave, dobimo
kjer so komponente vektorja kotne hitrosti. Zadnja enačba je integrirana in daje eno enačbo povezave, ki kaže, da se središče krogle C giblje v ravnini, ki je vzporedna z ravnino in ločena od nje na razdalji, ki je enaka polmeru krogle R.
Vsi izreki in enačbe statike izhajajo iz več začetnih določb, sprejetih brez matematičnega dokaza in imenovanih aksiomi ali načela statike. Aksiomi statike so rezultat posplošitev številnih poskusov in opazovanj ravnotežja in gibanja teles, ki jih praksa vedno znova potrjuje. Nekateri od teh aksiomov so posledice osnovnih zakonov mehanike, s katerimi se bomo seznanili v dinamiki.
Aksiom 1.Če na prosto absolutno togo telo delujeta dve sili, je telo lahko v ravnovesju, če in samo če sta ti sili enaki po velikosti ( F 1 = F 2) in so usmerjeni vzdolž ene ravne črte v nasprotnih smereh (slika 10).
Sl.10
Aksiom 1 določa najenostavnejši uravnotežen sistem sil, saj izkušnje kažejo, da prosto telo, na katerega deluje samo ena sila, ne more biti v ravnovesju.
Aksiom 2. Delovanje danega sistema sil na absolutno togo telo se ne bo spremenilo, če mu dodamo ali odvzamemo uravnotežen sistem sil.
Ta aksiom določa, da sta dva sistema sil, ki se razlikujeta po uravnoteženem sistemu, enaka drugemu.
Posledica 1. in 2. aksioma. Delovanje sile na absolutno togo telo se ne spremeni, če točko delovanja sile premaknemo vzdolž njene linije delovanja na katero koli drugo točko telesa.
Slika 11
Pravzaprav naj na togo telo deluje sila v točki A moč (slika 11). Vzemimo poljubno točko na liniji delovanja te sile IN in nanj delujeta dve uravnoteženi sili in , tako da je = , = . To ne bo spremenilo učinka sile na telo. Toda po aksiomu 1 tudi sile tvorijo uravnotežen sistem, ki ga je mogoče zavrniti. Kot rezultat, na telesu. Delovala bo samo ena sila, ki je enaka, vendar deluje v točki IN.
Tako lahko vektor, ki predstavlja silo, velja za uporabljenega na kateri koli točki na liniji delovanja sile (tak vektor se imenuje drsenje).
Aksiom 3(aksiom paralelograma sil). Dve sili, ki delujeta na telo v eni točki, imata rezultanto, ki deluje v isti točki in je predstavljena z diagonalo paralelograma, zgrajenega na teh silah, kot na straneh.
Vektor, ki je enak diagonali paralelograma, sestavljenega iz vektorjev in (slika 12), se imenuje geometrijska vsota vektorjev in : = + .
Slika 12
Velikost rezultante
|
Seveda bo taka enakost upoštevana le pod pogojem, da so te sile usmerjene vzdolž ene ravne črte v eno smer. Če se izkaže, da so vektorji sil pravokotni, potem
Posledično lahko aksiom 3 formuliramo tudi takole: dve sili, ki delujeta na telo v eni točki, imata rezultanto, ki je enaka geometrijski (vektorski) vsoti teh sil in delujeta v isti točki.
Aksiom 4. Pri vsakem delovanju enega materialnega telesa na drugega pride do reakcije enake velikosti, vendar nasprotne smeri.
Zakon enakosti akcije in reakcije je eden od osnovnih zakonov mehanike. Iz tega sledi, da če telo A deluje na telo B s silo, tedaj hkrati telo IN vpliva na telo A z enako velikostjo in silo, usmerjeno vzdolž iste ravne črte, vendar v nasprotni smeri = (slika 13). Vendar pa sile ne tvorijo uravnoteženega sistema sil, saj delujejo na različna telesa.
Slika 13
Aksiom 5(načelo strjevanja). Ravnotežje spremenljivega (deformabilnega) telesa pod vplivom danega sistema sil ne bo moteno, če se telo šteje za utrjeno (popolnoma trdno).
Trditev, izražena v tem aksiomu, je očitna. Na primer, jasno je, da ravnotežje verige ne bo moteno, če se njeni členi štejejo za varjene drug z drugim itd.
Povezave in njihove reakcije.
Po definiciji imenujemo telo, ki ni vezano na druga telesa in se lahko iz določenega položaja premika v prostoru. prost(na primer balon v zraku). Telo, ki mu gibanje v prostoru onemogočajo druga telesa, ki so pritrjena ali v stiku z njim, se imenuje nesvoboden. Vse, kar omejuje gibanje danega telesa v prostoru, bomo imenovali zveza.
Na primer, telo, ki leži na mizi, je neprosto telo. Njena povezava je ravnina mize, ki preprečuje premikanje telesa navzdol.
Tako imenovani načelo osvoboditve, ki ga bomo uporabljali v prihodnje. Napisano je takole.
Vsako neprosto telo lahko osvobodimo, če odstranimo povezave in njihovo delovanje na telo nadomestimo s silami, tako da telo ostane v ravnotežju.
Sila, s katero določena povezava deluje na telo in preprečuje eno ali drugo njegovo gibanje, se imenuje reakcijska (proti) sila povezave ali preprosto reakcija povezave.
Torej ima telo, ki leži na mizi, povezavo – mizo. Telo ni svobodno. Naredimo jo prosto - odstranimo mizo in da bo telo ostalo v ravnovesju, zamenjamo mizo s silo, usmerjeno navzgor in seveda enako teži telesa.
Reakcija povezave je usmerjena v nasprotno smer od tiste, v kateri povezava ne dopušča premikanja telesa. Kadar zveza hkrati preprečuje gibanje telesa v več smereh, je tudi smer reakcije povezave vnaprej neznana in jo je treba določiti kot rezultat reševanja obravnavanega problema.
Razmislimo, kako so usmerjene reakcije nekaterih osnovnih vrst vezi.
1. Gladka ravnina (površina) ali podpora. Gladko površino bomo imenovali trenje, ob katerem lahko dano telo v prvem približku zanemarimo. Takšna površina preprečuje, da bi se telo premikalo samo v smeri skupne pravokotnice (normale) na površine dotikajočih se teles na mestu njihovega stika (sl. 14, A). Zato reakcija n gladka površina ali nosilec je usmerjen vzdolž skupne normale na površine dotikajočih se teles na točki njihovega stika in se uporablja na tej točki. Ko je ena od kontaktnih površin točka (slika 14, b), potem je reakcija usmerjena normalno na drugo površino.
Če površine niso gladke, je treba dodati še eno silo - silo trenja, ki je usmerjena pravokotno na normalno reakcijo v smeri, nasprotni možnemu drsenju telesa.
Sl.14 Sl.15
Slika 16
2. Navoj. Povezava, izdelana v obliki prožne, neraztegljive niti (slika 15), ne daje telesu M odmaknite se od točke obešanja niti v smeri A.M.. Zato reakcija T napeta nit je usmerjena vzdolž niti iz telesa do točke njegove prekinitve. Tudi če lahko vnaprej ugibate, da je reakcija usmerjena proti telesu, jo je treba še vedno usmeriti stran od telesa. To je pravilo. Odpravlja nepotrebne in nepotrebne predpostavke in, kot bomo videli kasneje, pomaga ugotoviti, ali je palica stisnjena ali raztegnjena.
3. Cilindrični spoj (ležaj). Če sta dve telesi povezani s sornikom, ki poteka skozi luknje v teh telesih, se taka povezava imenuje tečaj ali preprosto tečaj; Središčna črta sornika se imenuje os tečaja. Telo AB, pritrjen s tečajem na nosilec D(Slika 16, A), se lahko po želji vrti okoli osi tečaja (v risalni ravnini); to je konec A telo se ne more premakniti v nobeno smer pravokotno na os tečaja. Zato reakcija R cilindrični tečaj ima lahko katero koli smer v ravnini, ki je pravokotna na os tečaja, tj. v letalu A hu. Za moč R v tem primeru niti njen modul ni vnaprej znan R, niti smeri (kota).
4. Kroglični zglob in potisni ležaj. Ta vrsta povezave fiksira določeno točko telesa, tako da se ne more premikati v prostoru. Primeri takšnih povezav so kroglična peta, s pomočjo katere je kamera pritrjena na stojalo (slika 16, b) in ležaj s potiskom (potisk) (slika 16, V). Reakcija R kroglični zglob ali potisni ležaj ima lahko katero koli smer v prostoru. Zanj niti reakcijski modul ni vnaprej znan R, niti kotov, ki jih tvori z osemi x, y, z.
Slika 17
5. Palica. Naj bo povezava v neki strukturi palica AB, na koncih pritrjen s tečaji (slika 17). Predpostavimo, da lahko težo palice zanemarimo v primerjavi z obremenitvijo, ki jo zaznava. Potem bosta na palico delovali le dve sili, ki delujeta na tečajih A in IN. Če pa je palica AB je v ravnovesju, potem se v skladu z aksiomom 1 uporablja v točkah A in IN sile morajo biti usmerjene vzdolž ene ravne črte, to je vzdolž osi palice. Posledično palica, obremenjena na koncih, katere težo lahko zanemarimo v primerjavi s temi obremenitvami, deluje samo na napetost ali stiskanje. Če je taka palica povezava, bo reakcija palice usmerjena vzdolž osi palice.
6. Premična zgibna podpora (slika 18, podpora A) preprečuje premikanje telesa samo v smeri, ki je pravokotna na drsno ravnino nosilca. Reakcija takšnega nosilca je usmerjena normalno na površino, na kateri ležijo valji gibljivega nosilca.
7. Fiksna zgibna podpora (slika 18, podpora IN). Reakcija takšne podpore poteka skozi os tečaja in ima lahko katero koli smer v ravnini risbe. Pri reševanju nalog bomo reakcijo upodabljali po komponentah in po smereh koordinatnih osi. Če po rešitvi problema najdemo in , potem bo določena tudi reakcija; modulo
Slika 18
Način pritrditve, prikazan na sliki 18, se uporablja tako, da v žarku AB ob spremembi njegove dolžine zaradi temperaturnih sprememb ali upogibanja niso nastale dodatne napetosti.
Upoštevajte, da če podpora AČe tudi žarek (slika 18) naredimo negibnega, potem bo žarek, ko nanj deluje katerikoli ravninski sistem sil, statično nedoločen, saj bodo tedaj tri ravnotežne enačbe vključevale štiri neznane reakcije , , , .
8. Fiksna opora za stiskanje ali togo vstavljanje (slika 19). V tem primeru deluje sistem porazdeljenih reakcijskih sil na vgrajeni konec nosilca s strani nosilnih ravnin. Ob upoštevanju teh sil, ki jih je treba pripeljati v središče A
Včasih morate preučiti ravnovesje netrogih teles. V tem primeru bomo uporabili predpostavko, da če je to netogo telo v ravnovesju pod delovanjem sil, potem ga lahko obravnavamo kot trdno telo z uporabo vseh pravil in metod statike.