Mga pangunahing uri ng reaksyon ng mga mekanikal na koneksyon. Mga koneksyon at reaksyon ng mga koneksyon
Mga koneksyon at reaksyon ng mga koneksyon
Ang lahat ng mga batas at theorems ng statics ay may bisa para sa isang libreng matibay na katawan.
Ang lahat ng mga katawan ay nahahati sa libre at nakagapos.
Ang mga malayang katawan ay mga katawan na ang paggalaw ay hindi limitado.
Ang mga nakagapos na katawan ay mga katawan na ang paggalaw ay nililimitahan ng ibang mga katawan.
Pinipigilan ng mga katawan ang paggalaw ibang mga katawan ang tinatawagmga koneksyon.
Ang mga puwersang kumikilos mula sa mga koneksyon at pumipigil sa paggalaw ay tinatawagmga reaksyon ng mga koneksyon.
Ang reaksyon ng komunikasyon ay palaging nakadirekta mula sa gilidkung saan hindi ka makakapunta.
Ang anumang nakagapos na katawan ay maaaring isipin na libre kung ang mga bono ay papalitan ng mga reaksyon (ang prinsipyo ng pagpapalaya mula sa mga bono).
Ang lahat ng mga koneksyon ay maaaring nahahati sa ilang mga uri.
Koneksyon - makinis na suporta (walang friction)
Larawan 1
Ang reaksyon ng suporta ay inilalapat sa punto ng suporta at palaging nakadirekta patayo sa suporta (Larawan 1).
Flexible na komunikasyon
(thread, rope, cable, chain) Ang load ay sinuspinde sa dalawang thread (Fig. 2).
Figure 2
Matigas na pamalo
Sa mga diagram, ang mga rod ay inilalarawan bilang isang makapal na solidong linya (Larawan 3).

Larawan 3
Ang baras ay maaaring i-compress o iunat. Ang reaksyon ng baras ay nakadirekta kasama ang baras. Gumagana ang baras sa pag-igting o compression. Ang eksaktong direksyon ng reaksyon ay natutukoy sa pamamagitan ng pag-alis ng pag-iisip ng baras at pagsasaalang-alang sa mga posibleng paggalaw ng katawan nang walang koneksyon na ito.
Posibleng relokasyon Ang punto ay isang napakaliit na paggalaw ng kaisipan na pinapayagan sa isang naibigay na sandali ng mga koneksyon na ipinataw dito.
Tinatanggal namin ang baras 1, sa kasong ito ay bumagsak ang baras 2. Samakatuwid, ang puwersa mula sa baras 1 (reaksyon) ay nakadirekta paitaas. Tinatanggal namin ang baras 2. Sa kasong ito, ang puntoA bumagsak, lumalayo sa dingding. Dahil dito, ang reaksyon ng baras 2 ay nakadirekta patungo sa dingding.
Articulated na suporta
Ang bisagra ay nagbibigay-daan sa pag-ikot sa paligid ng attachment point. Mayroong dalawang uri ng bisagra.
Movable joint
Ang baras na nakakabit sa bisagra ay maaaring paikutin sa paligid ng bisagra, at ang attachment point ay maaaring gumalaw kasama ang gabay (platform) (Larawan 4).

Larawan 4
Ang reaksyon ng movable hinge ay nakadirekta patayo sa sumusuportang ibabaw, dahil ang paggalaw lamang sa sumusuportang ibabaw ay hindi pinapayagan.
Nakapirming bisagra
Ang attachment point ay hindi maaaring ilipat. Ang baras ay maaaring malayang umiikot sa paligid ng axis ng bisagra. Ang reaksyon ng naturang suporta ay dumadaan sa axis ng bisagra, ngunit hindi alam sa direksyon. Karaniwan itong inilalarawan bilang dalawang bahagi: pahalang at patayo( Rx ; R y) (Larawan 5).
Larawan 5
Pinching o "sealing"
Ang anumang paggalaw ng attachment point ay hindi posible.
Sa ilalim ng impluwensya ng mga panlabas na pwersa, isang reaktibong puwersa at isang reaktibong sandali M ang lumitaw sa suporta R , pinipigilan ang pag-ikot (Larawan 6).
Larawan 6
Ang reaktibong puwersa ay karaniwang kinakatawan bilang dalawang bahagi kasama ang mga coordinate axes![]()
Mga halimbawa ng paglutas ng problema
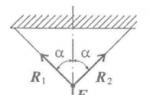
Halimbawa 1. Ang load ay sinuspinde sa mga tungkod at lubid at nasa equilibrium (Larawan 7). Iguhit ang sistema ng mga puwersa na kumikilos sa bisagraA.

Larawan 7
Solusyon
1. Ang mga reaksyon ng mga rod ay nakadirekta kasama ang mga rod, ang mga reaksyon ng mga nababaluktot na koneksyon ay nakadirekta kasama ang mga thread sa direksyon ng pag-igting (Larawan 7a).
2. Upang matukoy ang eksaktong direksyon ng mga puwersa sa mga rod, inalis namin ang mga rod 1 at 2 nang sunud-sunodA.
Hindi namin isinasaalang-alang ang isang nakatigil na bloke na may mga puwersang kumikilos dito.
3. Alisin ang baras 1, puntoA tumataas at lumalayo sa dingding, samakatuwid, ang reaksyon ng baras 1 ay nakadirekta patungo sa dingding.
4. Alisin ang baras 2, puntoA tumataas at lumalapit sa dingding, samakatuwid, ang reaksyon ng baras 2 ay nakadirekta mula sa dingding pababa.
5. Ang lubid ay humihila sa kanan.
6. Palayain ang iyong sarili mula sa mga koneksyon (Larawan 7b).
Halimbawa 2. Ang bola ay sinuspinde sa isang sinulid at nakapatong sa dingding (Larawan 8a). Tukuyin ang mga reaksyon ng thread at ang makinis na suporta (pader).

Larawan 8
Solusyon
1. Thread reaction - kasama ang thread hanggang sa isang puntoSA pataas (Larawan 8b).
2. Reaksyon ng isang makinis na suporta (pader) - normal sa ibabaw ng suporta.
Mga tanong at takdang-aralin sa pagsusulit
4. Ipahiwatig ang posibleng direksyon ng mga reaksyon sasumusuporta(Larawan 9).

Larawan 9
1. Isang makinis (friction-free) na eroplano o ibabaw. Ang ganitong mga koneksyon ay pumipigil sa katawan mula sa paglipat lamang sa direksyon ng karaniwang normal sa punto ng contact, kung saan ang kaukulang reaksyon ay ididirekta. Samakatuwid, ang reaksyon ng isang makinis na flat support ay patayo sa suportang ito (reaksyon sa Fig. 12,a); ang reaksyon ng isang makinis na pader ay patayo sa dingding na ito Fig. 12, b); ang reaksyon ng isang makinis na ibabaw ay nakadirekta kasama ang normal sa ibabaw na ito, na iginuhit sa punto ng contact sa Fig. 12, c).

2. Matalim na protrusion. Sa kasong ito, maaari nating ipagpalagay na ang protrusion mismo ay suportado, at ang katawan na pinag-uusapan ay nagsisilbing suporta. Ito ay humahantong sa kaso 1 at ang konklusyon na ang reaksyon ng isang makinis na protrusion ay nakadirekta nang normal sa ibabaw ng sumusuportang katawan (puwersa sa Fig. 12, c).
3. Flexible na koneksyon (walang timbang na thread, cable, chain, atbp.). Ang kaukulang reaksyon ay nakadirekta kasama ang koneksyon mula sa punto ng attachment ng thread hanggang sa punto ng suspensyon (puwersa sa Fig. 11, d, puwersa sa Fig. 12, b).
4. Walang timbang na tuwid na baras na may bisagra sa mga dulo. Ang reaksyon ay nakadirekta kasama ang baras. Dahil ang baras ay maaaring i-compress o i-stretch, ang reaksyon ay maaaring idirekta kapwa patungo sa suspension point ng rod at malayo sa suspension point (mga reaksyon sa Fig. 13, a).
5. Walang timbang na cranked o curved rod. Ang reaksyon ay nakadirekta sa isang tuwid na linya na dumadaan sa mga sentro ng mga bisagra ng dulo (force 53 sa Fig. 13, a; force S sa Fig. 13, b).

6. Movable hinge support. Ang reaksyon ay nakadirekta patayo sa support plane (rolling plane) (Fig. 14, a, b).

7. Cylindrical hinge (Larawan 15, a), radial bearing (Larawan 15, b). Ang reaksyon ay dumadaan sa gitna ng bisagra (ang gitna ng gitnang seksyon ng tindig) at namamalagi sa isang eroplano na patayo sa axis ng bisagra (tindig).
Ito ay katumbas ng dalawang pwersa na hindi alam sa magnitude - ang mga bahagi ng reaksyong ito kasama ang kaukulang coordinate axes (mga puwersa sa Fig. 15, a; at sa Fig. 15, b). (Para sa paliwanag nito, tingnan din ang halimbawa sa pahina 16).


8. Spherical hinge (Fig. 16, a), thrust bearing (o angular contact bearing) (Fig. 16, b). Ang reaksyon ay binubuo ng tatlong pwersa na hindi alam sa magnitude - ang mga bahagi ng reaksyon kasama ang mga axes ng spatial coordinate system.
9. Matigas na selyo (Larawan 17). Kapag ang isang sistema ng mga puwersa ng eroplano ay kumikilos sa isang katawan, ang kabuuang reaksyon ng pagkaka-embed ay binubuo ng isang puwersa na may mga sangkap na XA at UA, at isang pares ng mga puwersa na may isang sandali M, na matatagpuan sa parehong eroplano bilang mga kumikilos na pwersa.
10. Sliding seal (Larawan 18). Sa kaso ng isang sistema ng eroplano ng mga puwersa at ang kawalan ng alitan, ang reaksyon ay binubuo ng isang puwersa N at isang pares ng mga puwersa na may isang sandali M, na matatagpuan sa parehong eroplano bilang ang kumikilos na pwersa. Ang puwersa N ay patayo sa direksyon ng pag-slide.



Mga tanong sa pagsusulit sa sarili
1. Ano ang tinatawag na ganap na matibay na katawan, isang materyal na punto?
2. Kilalanin ang mga elemento ng puwersa. Sa anong mga paraan maaari mong itakda ang puwersa?
3. Ano ang tinatawag na vector moment of force na may kaugnayan sa isang punto Ano ang algebraic moment of force?
4. Sa anong kaso ang sandali ng isang puwersa na may kaugnayan sa isang punto ay katumbas ng zero?
5. Ano ang tinatawag na sistema ng pwersa? Anong mga sistema ng pwersa ang tinatawag na katumbas?
6. Ano ang tinatawag na resultang sistema ng pwersa?
7. Tukuyin ang isang non-free solid, bond, bond reaction?
8. Maaari bang ituring na malaya ang isang hindi malayang katawan?
9. Anong dalawang grupo ang nahahati sa mga puwersang kumikilos sa isang non-free rigid body?
Ang anumang libreng katawan sa kalawakan ay may anim na antas ng kalayaan: maaari itong gumalaw kasama ang tatlong axes at umiikot sa mga ax na ito. Ang mga katawan ay bihirang nasa isang libreng estado sa karamihan ng mga kaso, ang kanilang paggalaw ay limitado sa pamamagitan ng mga koneksyon. Ang mga hadlang ay mga paghihigpit na nagbubukod sa posibilidad ng paggalaw ng isang katawan sa isang tiyak na direksyon. Kung ang mga aktibong pwersa ay kumikilos sa isang nakapirming katawan, kung gayon ang mga reaktibong pwersa o mga reaksyon ay lumitaw sa mga koneksyon, na umaakma sa sistema ng mga aktibong pwersa sa isang ekwilibriyo. Tinutukoy ng kumbinasyon ng aktibo at reaktibong balanseng pwersa ang stress na estado ng katawan at ang pagpapapangit nito.
Ang mga reaksyon ng bono ay matatagpuan gamit ang mga equation ng ekwilibriyo. Sa kasong ito, ang desisyon ay isinasagawa ayon sa sumusunod na plano:
- tukuyin ang mga panlabas na aktibong pwersa na inilapat sa isang napiling katawan o grupo ng mga katawan;
- ang napiling bagay (katawan) ay pinalaya mula sa mga bono at ang mga puwersa ng reaksyon ng mga bono ay inilapat sa halip;
- Ang pagkakaroon ng napiling mga coordinate axes, bumubuo sila ng mga equation ng ekwilibriyo at, nang malutas ang mga ito, hanapin ang mga puwersa ng reaksyon ng mga bono.
Para sa isang spatial na sistema ng mga puwersa, anim na equation ng ekwilibriyo (13.7) ang maaaring i-compile. Gamit ang mga equation na ito, anim na hindi kilalang reaksyon ang tinutukoy.
Tinatawag ang mga problemang malulutas lamang gamit ang mga static equilibrium equation statically definable. Kung ang isang mas malaking bilang ng mga koneksyon ay ipinataw sa napiling bagay, kung gayon ang gawain ay nagiging statically indeterminate at upang malutas ito, bilang karagdagan sa mga equation ng ekwilibriyo, kinakailangan na gumamit ng mga karagdagang equation na pinagsama-sama sa batayan ng pagsusuri ng pagpapapangit. Sa pangkalahatan, ang pag-secure o pagkonekta ng dalawang bahagi ay maaaring alisin mula sa isa hanggang anim na antas ng kalayaan, i.e. magpataw mula isa hanggang anim na koneksyon. Alinsunod dito, mula isa hanggang anim na reaksyon ay maaaring mangyari sa pagsasama-sama. Ang dami ng mga reaktibong pwersa at ang kanilang direksyon ay nakasalalay sa likas na katangian ng mga koneksyon.
Narito ang mga pinakakaraniwang uri ng pangkabit at pagkonekta ng mga bahagi.
- 1. Mga koneksyon na hindi kasama ang posibilidad ng paggalaw sa isang direksyon lamang. Sa ganitong mga compound, isang reaksyon lamang ng isang tiyak na direksyon ang nangyayari. Kasama sa mga koneksyon ng ganitong uri ang:
- a) koneksyon sa pamamagitan ng pagpindot sa dalawang katawan sa isang punto o sa isang linya. Kapag hinawakan, nangyayari ang isang reaksyon na nakadirekta kasama ang pangkalahatang normal sa mga nakadikit na ibabaw (Larawan 13.5). Ang ganitong koneksyon ay tinatawag na articulated-movable;
kanin. 13.5.
- b) ang koneksyon na ginawa ng isang cable, thread, chain ay nagbibigay ng isang reaksyon na nakadirekta kasama ng isang nababaluktot na koneksyon, at ang gayong koneksyon ay maaari lamang gumana sa pag-igting (tingnan ang Fig. 13.5, b);
- c) ang isang koneksyon sa anyo ng isang matibay na tuwid na baras na may mga hinged na dulo ay nagbibigay din ng isang reaksyon na nakadirekta sa kahabaan ng axis ng baras (tingnan ang Fig. 13.5, c) sa ngunit maaaring gumana sa parehong pag-igting at compression.

kanin. 13.6.
Sa Fig. 13.5, G ang isang katawan ay ipinapakita na may tatlong mga hadlang na ipinataw dito; ang bawat koneksyon ay hindi kasama ang posibilidad ng paggalaw sa isang direksyon at nagbibigay ng isang reaksyon, ang direksyon kung saan ay kilala.
- 2. Ang isang fastening o koneksyon na hindi kasama ang paggalaw sa dalawang direksyon at, nang naaayon, ay nagbibigay ng dalawang reaksyon, ay tinatawag na isang hinged-fixed support o isang cylindrical hinge (Fig. 13.6).
- 3. Ang koneksyon na hindi kasama ang paggalaw sa tatlong direksyon at nagbibigay ng tatlong reaksyon ay tinatawag na spatial o ball joint (Fig. 13.7).
- 4. Ang pangkabit na hindi kasama ang lahat ng anim na antas ng kalayaan ay tinatawag na matibay na pangkabit o pag-embed. Maaaring lumitaw ang anim na reactive force factor sa pag-embed - tatlong reactive forces at tatlong reactive moments (Fig. 13.8). Kapag ang mga puwersang matatagpuan sa isang eroplano ay kumikilos sa isang katawan na may mahigpit na pagkaka-embed, dalawang reaktibong pwersa at isang reaktibong sandali ang lumitaw sa pagkaka-embed.

kanin. 13.7.

kanin. 13.8.
Kapag gumagawa ng mga kalkulasyon, ang mga suporta ay naka-schematize at may kondisyong nahahati sa tatlong pangunahing grupo:
- articulated at movable(Larawan 13.9, A), perceiving lamang ng isang linear reaksyon /?;
- articulated-fixed(Larawan 13.9, b), nakikita ang dalawang linear na reaksyon R At N.
- pagkukurot, o pagtatatak(Larawan 13.9, V), pagdama ng mga linear na reaksyon R At N at sandali M.

kanin. 13.9.
Kapag ang mga tunay na katawan ay nakikipag-ugnay at sa panahon ng kanilang kamag-anak na paggalaw, ang mga puwersa ng friction ay lumitaw sa mga lugar ng kanilang pakikipag-ugnay, na maaaring ituring bilang isang espesyal na uri ng mga reaktibong pwersa. Ang puwersa ng friction ay matatagpuan sa eroplano ng pakikipag-ugnay ng mga katawan; kapag gumagalaw, ito ay nakadirekta sa direksyon na kabaligtaran sa kamag-anak na bilis ng katawan.
Halimbawa. Ang baras 1 na may gear 2 na nakakabit dito ay naka-mount sa dalawang bearings A At SA. Ang isang belt drive pulley 3 ay naka-mount sa libreng dulo ng baras (Fig. 13.10 Ang mga geometric na sukat ay kilala. A, s, pagpapadala ng torque M, pulley diameter D, lahat ng mga parameter ng bevel gear, pati na rin ang ratio ng mga puwersa ng pag-igting ng sinturon F a JF al= 2. Kinakailangang matukoy ang reaksyon ng mga suporta at ang puwersa ng pag-igting ng sinturon.

kanin. 13.10.
Isinasagawa namin ang solusyon sa tatlong hakbang.
1. Tinutukoy namin ang mga aktibong pwersang kumikilos sa system. Ang isang spatially located force ay kumikilos sa isang bevel gear, ang mga bahagi nito kasama ang coordinate axes ay itinalaga nang naaayon. F v F r At F a . Component F ( , tinatawag na circumferential force, ay tinutukoy ng isang ibinigay na torque batay sa equation ng mga sandali tungkol sa axis z

Radial na bahagi F r at axial component F a tinutukoy ng circumferential force F ( batay sa tinukoy na geometry ng bevel gear.
2. Pinakawalan namin ang baras (equilibrium object) mula sa mga koneksyon at sa halip ay naglalapat ng mga puwersa ng reaksyon X l U l, X c, Y B Z B .
Bearings A At SA dapat ituring bilang mga hinged na suporta, dahil palagi silang may mga puwang. Sa suporta A dalawang reaksyon ang nangyayari X l At U l, dahil ang suportang ito ay nagbabawal sa paggalaw ng baras lamang sa mga nakahalang direksyon. Tatlong reaksyon ang nangyayari sa tamang suporta X in, U in At Z B , dahil nililimitahan nito ang paggalaw ng baras din sa direksyon ng ehe. Ang mga aktibo at reaktibong pwersa ay magkasamang bumubuo ng isang spatial na sistema ng balanseng pwersa.
3. Pumili ng coordinate system: axes X At sa inilagay sa isang eroplanong patayo sa axis ng shaft, at sa axis z itinuro namin ang kahabaan ng axis ng baras. Lumilikha kami ng anim na equation ng equilibrium gamit ang (13.7) at (13.8).

Gamit ang isang ibinigay na kondisyon F al = 2F ii2 at paglutas ng mga equation ng ekwilibriyo, hinahanap natin ang mga puwersa F aV F a2 at mga reaksyon ng suporta
Ang isa sa mga pangunahing konsepto ng mekanika ay ang konsepto ng isang mekanikal na sistema. Ang mekanikal na sistema ay nauunawaan bilang isang set ng isang may hangganan o walang katapusang bilang ng mga materyal na punto (o katawan) na nakikipag-ugnayan sa isa't isa alinsunod sa ikatlong batas ni Newton. Ito ay sumusunod na ang paggalaw ng bawat punto (o katawan) ng sistema ay nakasalalay sa parehong posisyon at sa paggalaw ng natitirang mga punto ng mekanikal na sistema na isinasaalang-alang.
Ang mga sistema ay nakikilala sa pagitan ng libre at hindi libre. Ang isang sistema ay tinatawag na libre kung ang lahat ng mga puntong kasama dito ay maaaring maghawak ng mga arbitraryong posisyon at magkaroon ng mga arbitraryong bilis. Kung hindi, iyon ay, kapag ang mga materyal na puntos na kasama sa sistema ay hindi maaaring sumakop sa mga arbitrary na posisyon o hindi maaaring magkaroon ng mga arbitrary na bilis, ang sistema ay tinatawag na hindi libre.
Ang isang halimbawa ng isang libreng mekanikal na sistema ay ang solar system, kung saan ang Araw at mga planeta ay maaaring ituring bilang mga materyal na katawan sa ilalim ng magkaparehong pagkilos ng Newtonian gravitational forces.
Ang isang halimbawa ng isang hindi-libreng sistema ay isang sistema na binubuo ng mga puntos, kung saan ang isa o
Ang ilan ay napipilitang manatili sa ilang mga linya o ibabaw sa panahon ng kanilang paggalaw.
Nauugnay sa paghahati ng mga sistema sa libre at hindi libre ay ang konsepto ng komunikasyon.
Sa mechanics, ang coupling ay nauunawaan bilang mga kondisyon na nagpapataw ng mga paghihigpit sa kalayaan ng paggalaw ng mga puntos sa isang sistema. Ang mga koneksyon ay maaaring magpataw ng mga paghihigpit sa parehong mga posisyon ng mga puntos at ang kanilang bilis. Sa pagsasagawa, ang mga koneksyon ay ginagawa gamit ang mga materyal na katawan o aparato (mga rod, mga thread, bisagra, atbp.).
Kung paanong ang mga pwersang kumikilos sa mga punto ng system ay nahahati sa panloob na pwersa at panlabas na pwersa, kaya ang mga koneksyon na ipinataw sa mga punto ng system ay maaaring nahahati sa panloob na koneksyon at panlabas na koneksyon. Sa pamamagitan ng panloob na mga koneksyon, ibig sabihin namin ang mga koneksyon na, kapag inilapat sa mga punto ng system, hindi pinipigilan ang system na malayang gumalaw pagkatapos itong biglang tumigas. Ang isang koneksyon na walang ganitong katangian ay tinatawag na panlabas. Halimbawa, kung ang dalawang punto ng isang solidong katawan ay konektado sa isa't isa sa pamamagitan ng isang hindi mapalawak at walang timbang na baras, kung gayon ang gayong koneksyon ay magiging panloob. Kaya, ang isang solidong katawan ay maaaring ituring bilang isang sistema na napapailalim sa mga panloob na koneksyon. Kung ang isa sa mga punto ng matibay na katawan ay nakabitin, kung gayon sa kasong ito ang koneksyon ay magiging panlabas.
Ang isang sistema na napapailalim lamang sa mga panloob na koneksyon ay libre, dahil maaari itong lumipat bilang isang libreng matibay na katawan. Kung kabilang sa mga koneksyon na ipinataw sa mga punto ng system ay may mga panlabas na koneksyon, kung gayon ang sistema ay hindi libre.
Ang mga kundisyon na naglilimita sa kalayaan ng paggalaw ng mga punto ng system ay analytically na ipinahayag sa anyo ng mga equation o hindi pagkakapantay-pantay ng form.
kung saan ang oras, ay ang mga coordinate at velocities ng isang system point, ayon sa pagkakabanggit,
tinutukoy ang ilang inertial reference system na may kaugnayan sa kung saan ang paggalaw ng sistemang ito ay isinasaalang-alang.
Ang mga koneksyon ay nakikilala sa pagitan ng pagpapanatili at hindi pag-iingat; Ang una ay tumutugma sa equal sign in (1.1), ang pangalawa ay tumutugma sa inequality sign.
Ang pagpapanatili at hindi naglalaman ng mga koneksyon ay tinatawag na dalawang-daan at isang-daan na koneksyon, ayon sa pagkakabanggit. Ang retaining link, habang pinipigilan ang paggalaw sa isang direksyon, pinipigilan din ang paggalaw sa kabilang direksyon. Pinipigilan ng di-nagpipigil na link ang paggalaw sa isang direksyon, ngunit hindi pinipigilan ang paggalaw sa kabilang direksyon.
Ang isang halimbawa ng isang may hawak na koneksyon ay dalawang parallel na eroplano sa pagitan kung saan gumagalaw ang bola. Isinasaalang-alang ang gitnang eroplano sa pagitan nila bilang isang coordinate plane, nakukuha natin ang constraint equation sa anyo: Kung ang bola ay gumagalaw sa isang pahalang na eroplano anumang sandali at maaaring umalis dito, kung gayon ang eroplanong ito ay magiging isang hindi nakakapigil na pagpilit. Ang kundisyon para sa naturang koneksyon ay ipahahayag ng hindi pagkakapantay-pantay (o ).
Ang isa pang halimbawa ng non-retaining tie ay isang string na may bola sa dulo. Isinasaalang-alang ang suspension point ng thread bilang pinagmulan ng mga coordinate at isinasaalang-alang ang thread na hindi mapalawak, maaari naming isulat ang kondisyon ng koneksyon na ito sa anyo ng hindi pagkakapantay-pantay.
nasaan ang mga coordinate ng bola, at ang haba ng thread.
Kung sa panahon ng paggalaw ng bola ang hindi pagkakapantay-pantay ay nasiyahan
ito ay nangangahulugan na ang thread ay lumuwag at ang bola ay napalaya mula sa koneksyon nito.
Kung, kapag gumagalaw ang bola, ang pagkakapantay-pantay
pagkatapos ito ay nangangahulugan na ang thread ay tensioned at isang koneksyon ay kumikilos sa bola.
Depende sa kung ang coupling equation ay tahasang naglalaman ng oras o hindi, ang mga coupling ay nahahati sa non-stationary (rheonomic) at stationary (scleronomic).
Ang mga koneksyon na nagpapataw ng mga paghihigpit lamang sa mga posisyon ng mga punto sa system ay tinatawag na may hangganan o geometriko; analytically ang mga ito ay ipinahayag ng equation
Dito at sa mga sumusunod ay ipinapalagay namin na ang mga koneksyon ay humahawak.
Kung ang mga koneksyon ay nagpapataw ng mga paghihigpit hindi lamang sa mga posisyon ng mga punto, kundi pati na rin sa kanilang mga bilis, kung gayon sila ay tinatawag na kaugalian o kinematic, at ang kanilang analytical expression ay may anyo.
Ang mga koneksyon ay nahahati din sa holonomic at non-holonomic. Kasama sa mga holonomic na koneksyon ang lahat ng may hangganan o geometric na koneksyon ng form (1.2), ibig sabihin, lahat ng koneksyon na nagpapataw ng mga paghihigpit sa mga posibleng posisyon ng mga puntos sa system. Kasama rin sa mga holonomic na koneksyon ang mga differential na koneksyon, na sa pamamagitan ng pagsasama ay maaaring mabawasan sa mga relasyon ng anyo (1.2):

kung saan ang ilang mga function ng mga coordinate, posibleng oras.
Kung ang pagkakaiba-iba ng mga koneksyon ng form (1.4) ay hindi maaaring bawasan sa may hangganan na mga relasyon ng form (1.2) sa pamamagitan ng pagsasama, kung gayon ang mga ito ay tinatawag na
nonholonomic o nonintegrable. Binigyang-pansin ni G. Hertz ang kahalagahan ng pagkakaiba sa pagitan ng holonomic at nonholonomic na koneksyon para sa konsepto ng virtual na paggalaw ng system.
Madaling makita na kung ang holonomic na mga hadlang ay nagpapataw ng mga paghihigpit sa mga posibleng posisyon ng mga puntos sa system, kung gayon ang mga nonholonomic na hadlang ay nagpapataw ng mga paghihigpit sa mga bilis ng mga puntos sa system. Ito ay sumusunod sa katotohanan na ang nonholonomic connection equation (1.4) ay maaaring palaging kinakatawan sa sumusunod na anyo:

Ang mga sistemang mekanikal na napapailalim sa mga hadlang na holonomic ay tinatawag na mga sistemang holonomic. Kung kabilang sa mga koneksyon ay mayroong mga nonholonomic, kung gayon ang mga sistema ay tinatawag na nonholonomic.
Kung ang nonholonomic constraints lamang ang ipapataw sa isang system, kung gayon ang ganitong sistema ay tinatawag na ganap na nonholonomic o maayos na nonholonomic.
Ang isang klasikong halimbawa ng paggalaw ng isang nonholonomic na sistema ay ang paggulong ng isang solidong bola sa isang magaspang na eroplano (halimbawa, ang paggalaw ng isang bilyar na bola).
Hayaang gumulong ang isang solidong bola ng radius nang hindi nadulas sa isang ganap na magaspang na eroplano. Kumuha tayo ng dalawang coordinate system na may isang karaniwang pinagmulan sa gitna ng bola C. Hayaang ang isa sa mga ito (system) ay lumipat sa pagsasalin, at hayaan ang pangalawa (system) na mahigpit na konektado sa bola (Fig. 1).
Ang posisyon ng bola sa bawat sandali ng oras ay maaaring matukoy ng limang coordinate: dalawang coordinate ng gitna ng bola (third coordinate) at tatlong Euler angle: ang precession angle, ang nutation angle 0 at ang anggulo ng tamang pag-ikot (Fig . 1). Ang kondisyon ng koneksyon sa problemang isinasaalang-alang ay ang kondisyon ng bola na humipo sa eroplano at ang pagbabaligtad
sa zero na bilis ng point A sa paghawak sa bola. Ang pagkuha sa gitna ng bola C bilang isang poste at tinutukoy ang bilis nito sa pamamagitan ng agarang anggular na bilis ng pag-ikot ng bola - through , at ang vector-radius na iginuhit mula sa gitna ng bola hanggang sa punto ng contact - through , maaari nating isulat ang bilis ng point A sa sumusunod na anyo:

Ang pag-project ng pagkakapantay-pantay ng vector na ito sa coordinate axis at pagbibigay-kasiyahan sa kondisyon ng koneksyon, nakuha namin
nasaan ang mga bahagi ng angular velocity vector. Ang huling equation ay isinama at nagbibigay ng isang equation ng koneksyon na nagpapakita na ang sentro ng bola C ay gumagalaw sa isang eroplanong parallel sa eroplano at humiwalay dito sa layo na katumbas ng radius ng bola R.
Ang lahat ng theorems at equation ng statics ay hinango mula sa ilang mga paunang probisyon, tinatanggap nang walang mathematical proof at tinatawag na axioms o mga prinsipyo ng statics. Ang mga axioms ng statics ay ang resulta ng mga generalization ng maraming mga eksperimento at mga obserbasyon sa balanse at paggalaw ng mga katawan, na paulit-ulit na nakumpirma ng pagsasanay. Ang ilan sa mga axiom na ito ay bunga ng mga pangunahing batas ng mekanika, na magiging pamilyar tayo sa dinamika.
Axiom 1. Kung ang dalawang pwersa ay kumikilos sa isang malayang ganap na matibay na katawan, kung gayon ang katawan ay maaaring nasa ekwilibriyo kung at kung ang mga puwersang ito ay magkapantay sa magnitude ( F 1 = F 2) at nakadirekta sa isang tuwid na linya sa magkasalungat na direksyon (Larawan 10).
Fig.10
Tinutukoy ng Axiom 1 ang pinakasimpleng balanseng sistema ng mga puwersa, dahil ang karanasan ay nagpapakita na ang isang malayang katawan kung saan isang puwersa lamang ang kumikilos ay hindi maaaring nasa ekwilibriyo.
Axiom 2. Ang pagkilos ng isang ibinigay na sistema ng mga puwersa sa isang ganap na matibay na katawan ay hindi magbabago kung ang isang balanseng sistema ng mga puwersa ay idinagdag dito o aalisin mula dito.
Ang axiom na ito ay nagtatatag na ang dalawang sistema ng mga puwersa na naiiba sa isang balanseng sistema ay katumbas ng bawat isa.
Corollary ng 1st at 2nd axioms. Ang pagkilos ng isang puwersa sa isang ganap na matibay na katawan ay hindi magbabago kung ang punto ng paggamit ng puwersa ay inilipat sa linya ng pagkilos nito sa anumang iba pang punto ng katawan.
Fig.11
Sa katunayan, hayaan ang isang matibay na katawan ay kumilos sa pamamagitan ng isang inilapat na puwersa sa isang punto A lakas (Larawan 11). Kumuha tayo ng di-makatwirang punto sa linya ng pagkilos ng puwersang ito SA at ilapat ang dalawang balanseng pwersa dito at , tulad na = , = . Hindi nito mababago ang epekto ng puwersa sa katawan. Ngunit ayon sa axiom 1, ang mga puwersa ay bumubuo rin ng isang balanseng sistema na maaaring tanggihan. Bilang isang resulta, sa katawan. Isang puwersa lamang ang kikilos, katumbas ng ngunit inilapat sa punto SA.
Kaya, ang vector na kumakatawan sa puwersa ay maaaring ituring na inilapat sa anumang punto sa linya ng pagkilos ng puwersa (ang naturang vector ay tinatawag na sliding).
Axiom 3(axiom ng paralelogram ng mga puwersa). Dalawang puwersa na inilapat sa isang katawan sa isang punto ay may resultang inilapat sa parehong punto at kinakatawan ng dayagonal ng isang paralelogram na binuo sa mga puwersang ito, tulad ng sa mga gilid.
Vector na katumbas ng dayagonal ng isang parallelogram na binuo sa mga vectors at (Fig. 12) ay tinatawag na geometric na kabuuan ng mga vectors at : = + .
Fig.12
Ang laki ng resulta
|
Siyempre, ang gayong pagkakapantay-pantay ay mapapansin lamang sa kondisyon na ang mga puwersang ito ay nakadirekta sa isang tuwid na linya sa isang direksyon. Kung ang mga vector ng puwersa ay lumabas na patayo, kung gayon
Dahil dito, ang axiom 3 ay maaari ding buuin tulad ng sumusunod: dalawang pwersa na inilapat sa isang katawan sa isang punto ay may resultang katumbas ng geometric (vector) na kabuuan ng mga puwersang ito at inilapat sa parehong punto.
Axiom 4. Sa anumang pagkilos ng isang materyal na katawan sa isa pa, mayroong isang reaksyon ng parehong magnitude, ngunit kabaligtaran sa direksyon.
Ang batas ng pagkakapantay-pantay ng aksyon at reaksyon ay isa sa mga pangunahing batas ng mekanika. Ito ay sumusunod mula dito na kung ang katawan A kumikilos sa katawan B na may puwersa, pagkatapos ay sa parehong oras ang katawan SA nakakaapekto sa katawan A na may parehong magnitude at puwersa na nakadirekta sa parehong tuwid na linya, ngunit sa kabaligtaran ng direksyon = (Larawan 13). Gayunpaman, ang mga puwersa ay hindi bumubuo ng isang balanseng sistema ng mga puwersa, dahil ang mga ito ay inilalapat sa iba't ibang mga katawan.
Fig.13
Axiom 5(prinsipyo ng solidification). Ang ekwilibriyo ng isang nababago (nababagong) katawan sa ilalim ng impluwensya ng isang ibinigay na sistema ng mga puwersa ay hindi maaabala kung ang katawan ay itinuturing na tumigas (ganap na solid).
Ang pahayag na ipinahayag sa axiom na ito ay halata. Halimbawa, malinaw na ang balanse ng kadena ay hindi maaabala kung ang mga link nito ay itinuturing na welded sa bawat isa, atbp.
Mga koneksyon at ang kanilang mga reaksyon.
Sa pamamagitan ng kahulugan, ang isang katawan na hindi nakakabit sa ibang mga katawan at maaaring gumawa ng anumang paggalaw sa espasyo mula sa isang naibigay na posisyon ay tinatawag na libre(halimbawa, isang lobo sa hangin). Ang isang katawan na ang mga paggalaw sa kalawakan ay pinipigilan ng ilang iba pang mga katawan na nakakabit o nakikipag-ugnayan dito ay tinatawag hindi malaya. Tatawagin namin ang lahat ng naglilimita sa paggalaw ng isang partikular na katawan sa kalawakan bilang isang koneksyon.
Halimbawa, ang isang katawan na nakahiga sa isang mesa ay isang hindi malayang katawan. Ang koneksyon nito ay ang eroplano ng talahanayan, na pumipigil sa katawan mula sa paglipat pababa.
Ang tinatawag na prinsipyo ng pagpapalaya, na gagamitin namin sa hinaharap. Ito ay nakasulat tulad nito.
Ang anumang di-libreng katawan ay maaaring gawing libre kung ang mga koneksyon ay aalisin at ang kanilang pagkilos sa katawan ay papalitan ng mga puwersa upang ang katawan ay mananatiling balanse.
Ang puwersa kung saan kumikilos ang isang ibinigay na koneksyon sa isang katawan, na pumipigil sa isa o isa pa sa mga paggalaw nito, ay tinatawag na reaksyon (counteraction) na puwersa ng koneksyon o simpleng reaksyon ng koneksyon.
Kaya ang isang katawan na nakahiga sa isang mesa ay may koneksyon - ang mesa. Ang katawan ay hindi libre. Gawin natin itong libre - aalisin natin ang mesa, at para manatili ang katawan sa ekwilibriyo, papalitan natin ang mesa ng puwersang nakadirekta paitaas at katumbas, siyempre, sa bigat ng katawan.
Ang reaksyon ng koneksyon ay nakadirekta sa direksyon na kabaligtaran sa kung saan ang koneksyon ay hindi nagpapahintulot sa katawan na lumipat. Kapag ang isang koneksyon ay sabay-sabay na pumipigil sa katawan mula sa paglipat sa ilang mga direksyon, ang direksyon ng reaksyon ng koneksyon ay hindi rin alam nang maaga at dapat na matukoy bilang isang resulta ng paglutas ng problemang isinasaalang-alang.
Isaalang-alang natin kung paano nakadirekta ang mga reaksyon ng ilang pangunahing uri ng mga bono.
1. Isang makinis na eroplano (ibabaw) o suporta. Tatawagin natin ang isang makinis na ibabaw na alitan kung saan ang isang partikular na katawan ay maaaring, sa unang pagtataya, ay mapabayaan. Ang ganitong ibabaw ay pumipigil sa katawan mula sa paglipat lamang sa direksyon ng karaniwang patayo (normal) sa mga ibabaw ng mga katawan na nakikipag-ugnay sa punto ng kanilang pakikipag-ugnay (Larawan 14, A). Samakatuwid ang reaksyon N ang makinis na ibabaw o suporta ay nakadirekta kasama ang karaniwang normal sa mga ibabaw ng mga katawan na nakikipag-ugnay sa punto ng kanilang pakikipag-ugnay at inilalapat sa puntong ito. Kapag ang isa sa mga contact surface ay isang punto (Fig. 14, b), pagkatapos ang reaksyon ay nakadirekta nang normal sa kabilang ibabaw.
Kung ang mga ibabaw ay hindi makinis, kailangan mong magdagdag ng isa pang puwersa - puwersa ng alitan, na nakadirekta patayo sa normal na reaksyon sa direksyon na kabaligtaran sa posibleng pag-slide ng katawan.
Fig.14 Fig.15
Fig.16
2. Thread. Ang koneksyon, na ginawa sa anyo ng isang nababaluktot, hindi napapalawak na thread (Fig. 15), ay hindi nagbibigay sa katawan M lumayo mula sa suspension point ng thread sa direksyon A.M.. Samakatuwid ang reaksyon T ang tensioned thread ay nakadirekta sa kahabaan ng thread mula sa katawan sa punto ng pagsususpinde nito. Kahit na maaari mong hulaan nang maaga na ang reaksyon ay nakadirekta sa katawan, kailangan pa rin itong idirekta palayo sa katawan. Yan ang rule. Tinatanggal nito ang hindi kailangan at hindi kinakailangang mga pagpapalagay at, tulad ng makikita natin sa ibang pagkakataon, nakakatulong na matukoy kung ang baras ay naka-compress o nakaunat.
3. Cylindrical joint (bearing). Kung ang dalawang katawan ay konektado sa pamamagitan ng isang bolt na dumadaan sa mga butas sa mga katawan na ito, kung gayon ang gayong koneksyon ay tinatawag na bisagra o simpleng bisagra; Ang gitnang linya ng bolt ay tinatawag na hinge axis. Katawan AB, nakakabit ng bisagra sa suporta D(Larawan 16, A), maaaring paikutin ayon sa ninanais sa paligid ng axis ng bisagra (sa drawing plane); ito na ang wakas A hindi makagalaw ang katawan sa anumang direksyon patayo sa axis ng bisagra. Samakatuwid ang reaksyon R ang isang cylindrical na bisagra ay maaaring magkaroon ng anumang direksyon sa isang eroplano na patayo sa axis ng bisagra, i.e. sa eroplano A hu. Para sa lakas R sa kasong ito, alinman sa modyul nito ay hindi alam nang maaga R, o direksyon (anggulo).
4. Ball joint at thrust bearing. Ang ganitong uri ng koneksyon ay nag-aayos ng ilang bahagi ng katawan upang hindi ito makagawa ng anumang paggalaw sa kalawakan. Ang mga halimbawa ng naturang mga koneksyon ay ang takong ng bola, sa tulong ng kung saan ang camera ay nakakabit sa tripod (Larawan 16, b) at isang tindig na may thrust (tulak) (Larawan 16, V). Reaksyon R ang isang ball joint o thrust bearing ay maaaring magkaroon ng anumang direksyon sa kalawakan. Para dito, hindi alam ang modulus ng reaksyon nang maaga R, ni ang mga anggulo na nabuo nito gamit ang mga palakol x, y, z.
Fig.17
5. Pamalo. Hayaan ang koneksyon sa ilang istraktura ay isang baras AB, naka-secure sa mga dulo na may mga bisagra (Larawan 17). Ipagpalagay natin na ang bigat ng pamalo ay maaaring mapabayaan kumpara sa kargada na nakikita nito. Pagkatapos ay dalawang puwersa lamang na inilapat sa mga bisagra ang kikilos sa pamalo A At SA. Ngunit kung ang pamalo AB ay nasa ekwilibriyo, pagkatapos, ayon sa axiom 1, inilapat sa mga punto A At SA ang mga puwersa ay dapat na nakadirekta sa isang tuwid na linya, ibig sabihin, kasama ang axis ng baras. Dahil dito, ang isang baras na na-load sa mga dulo, ang bigat nito ay maaaring mapabayaan kung ihahambing sa mga load na ito, ay gumagana lamang sa pag-igting o compression. Kung ang naturang baras ay isang link, kung gayon ang reaksyon ng baras ay ididirekta sa kahabaan ng axis ng baras.
6. Movable hinged support (Fig. 18, suporta A) pinipigilan ang katawan mula sa paglipat lamang sa direksyon na patayo sa sliding plane ng suporta. Ang reaksyon ng naturang suporta ay nakadirekta nang normal sa ibabaw kung saan ang mga roller ng movable support ay nagpapahinga.
7. Nakapirming suporta sa bisagra (Larawan 18, suporta SA). Ang reaksyon ng naturang suporta ay dumadaan sa axis ng bisagra at maaaring magkaroon ng anumang direksyon sa eroplano ng pagguhit. Kapag nilulutas ang mga problema, ilarawan namin ang reaksyon sa pamamagitan ng mga bahagi nito at kasama ang mga direksyon ng mga coordinate axes. Kung, nang malutas ang problema, makikita natin at , kung gayon ang reaksyon ay matutukoy din; modulo
Fig.18
Ang paraan ng pangkabit na ipinapakita sa Fig. 18 ay ginagamit upang sa beam AB walang karagdagang mga stress na lumitaw kapag ang haba nito ay nagbago dahil sa mga pagbabago sa temperatura o baluktot.
Tandaan na kung ang suporta A Kung ang sinag (Larawan 18) ay ginawa ding hindi gumagalaw, kung gayon ang sinag, kapag ang anumang sistema ng eroplano ng mga puwersa ay kumikilos dito, ay magiging statically indeterminate, mula noon ang tatlong equation ng ekwilibriyo ay magsasama ng apat na hindi kilalang reaksyon , , , .
8. Nakapirming pinching support o matibay na pagkaka-embed (Fig. 19). Sa kasong ito, ang isang sistema ng mga ibinahagi na puwersa ng reaksyon ay kumikilos sa naka-embed na dulo ng beam mula sa gilid ng mga sumusuportang eroplano. Isinasaalang-alang ang mga puwersang ito na dadalhin sa sentro A
Minsan kailangan mong pag-aralan ang ekwilibriyo ng mga di-matibay na katawan. Sa kasong ito, gagamitin namin ang pagpapalagay na kung ang hindi matibay na katawan na ito ay nasa balanse sa ilalim ng pagkilos ng mga puwersa, kung gayon maaari itong ituring bilang isang solidong katawan, gamit ang lahat ng mga patakaran at pamamaraan ng estatika.