Основні типи реакції зв'язків механіки. Зв'язки та реакції зв'язків
Зв'язки та реакції зв'язків
Усі закони та теореми статики справедливі для вільного твердого тіла.
Усі тіла поділяються на вільні та пов'язані.
Вільні тіла – тіла, переміщення яких не обмежене.
Пов'язані тіла – тіла, переміщення яких обмежене іншими тілами.
Тіла, що обмежують переміщення інших тіл, називаютьзв'язками.
Сили, що діють від зв'язків та перешкоджають переміщенню, називаютьреакціями зв'язків.
Реакція зв'язку завжди спрямована з того боку,куди не можна переміщатись.
Будь-яке пов'язане тіло можна уявити вільним, якщо зв'язку замінити їх реакціями (принцип звільнення зв'язків).
Усі зв'язки можна поділити на кілька типів.
Зв'язок - гладка опора (без тертя)
Малюнок 1
Реакція опори прикладена в точці опори і завжди спрямована перпендикулярно до опори (рис. 1).
Гнучкий зв'язок
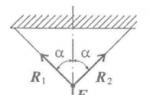
(Нитка, мотузка, трос, ланцюг) Вантаж підвішений на двох нитках (рис. 2).
Малюнок 2
Жорсткий стрижень
На схемах стрижні зображують товстою суцільною лінією (рис. 3).

Малюнок 3
Стрижень може бути стиснутим або розтягнутим. Реакція стрижня спрямована вздовж стрижня. Стрижень працює на розтягування чи стиснення. Точне напрям реакції визначають, подумки прибравши стрижень і розглянувши можливі переміщення тіла без зв'язку.
Можливим переміщенням точки називається таке нескінченно мале уявне переміщення, яке допускається в даний момент накладеними на нього зв'язками.
Забираємо стрижень 1, у цьому випадку стрижень 2 падає вниз. Отже, сила від стрижня 1 (реакція) спрямована нагору. Прибираємо стрижень 2. У цьому випадку крапкаА опускається донизу, відсуваючись від стіни. Отже, реакція стрижня 2 спрямована стіні.
Шарнірна опора
Шарнір припускає поворот навколо точки закріплення. Розрізняють два види шарнірів.
Рухливий шарнір
Стрижень, закріплений на шарнірі, може повертатися навколо шарніра, а точка кріплення може переміщатися вздовж напрямної (майданчика) (рис. 4).

Малюнок 4
Реакція рухомого шарніра спрямована перпендикулярно до опорної поверхні, тому що не допускається тільки переміщення поперек опорної поверхні.
Нерухомий шарнір
Крапка кріплення переміщатися не може. Стрижень може вільно повертатись навколо осі шарніра. Реакція такої опори проходить через вісь шарніра, але невідома у напрямку. Її прийнято зображати у вигляді двох складових: горизонтальної та вертикальної( Rx ; R у) (Рис. 5).
Малюнок 5
Защемлення або «загортання»
Будь-які переміщення точки кріплення неможливі.
Під дією зовнішніх сил в опорі виникають реактивна сила та реактивний момент М R , що перешкоджає повороту (рис. 6).
Малюнок 6
Реактивну силу прийнято представляти у вигляді двох складових уздовж осей координат![]()
Приклади розв'язання задач
приклад 1. Вантаж підвішений на стрижнях та канатах і знаходиться в рівновазі (рис. 7). Зобразити систему сил, що діють на шарнірА.

Малюнок 7
Рішення
1. Реакції стрижнів спрямовані вздовж стрижнів, реакції гнучких зв'язків спрямовані вздовж ниток у бік натягу (рис. 7а).
2. Для визначення точного спрямування зусиль у стрижнях подумки прибираємо послідовно стрижні 1 і 2. Аналізуємо можливі переміщення точкиА.
Нерухомий блок з діючими нею силами не розглядаємо.
3. Забираємо стрижень 1, точкаА піднімається та відходить від стіни, отже, реакція стрижня 1 спрямована до стіни.
4. Забираємо стрижень 2, точкаА піднімається і наближається до стіни, отже реакція стрижня 2 спрямована від стіни вниз.
5. Канат тягне праворуч.
6. Звільняємось від зв'язків (рис. 7б).
приклад 2. Куля підвішена на нитки і спирається на стіну (рис. 8а). Визначити реакції нитки та гладкої опори (стінки).

Малюнок 8
Рішення
1. Реакція нитки - вздовж нитки до точкиУ вгору (рис. 8б).
2. Реакція гладкої опори (стінки) – по нормалі від поверхні опори.
Контрольні питання та завдання
4. Вкажіть можливий напрямок реакцій уопорах(Мал. 9).

Малюнок 9
1. Гладка (без тертя) площину чи поверхню. Такі зв'язки перешкоджають переміщенням тіла лише у напрямку загальної нормалі в точці торкання, вздовж якої буде спрямована відповідна реакція. Тому реакція гладкої плоскої опори перпендикулярна до цієї опори (реакція на рис. 12,а); реакція гладкої стінки перпендикулярна до цієї стінки рис. 12, б); реакція гладкої поверхні спрямована нормалі до цієї поверхні, проведеної в точці торкання на рис. 12, в).

2. Гострий виступ. У цьому випадку можна вважати, що спирається сам виступ, а опорою служить тіло, що розглядається. Це призводить до випадку 1 і висновку, що реакція гладкого виступу спрямована нормалі до поверхні тіла, що спирається (сила на рис. 12, в).
3. Гнучкий зв'язок (невагома нитка, трос, ланцюг тощо). Відповідна реакція спрямована вздовж зв'язку від точки кріплення нитки до точки підвісу (сила на рис. 11 г, сила на рис. 12 б).
4. Невагомий прямолінійний стрижень із шарнірами на кінцях. Реакція спрямована вздовж стрижня. Оскільки стрижень може бути як стиснутий, так і розтягнутий, реакція може мати напрямок як до точки підвісу стрижня, так і від точки підвісу (реакції і на рис. 13 а).
5. Невагомий колінчастий або криволінійний стрижень. Реакція спрямована вздовж прямої, що проходить через центри кінцевих шарнірів (сила 53 на рис. 13 а, сила S на рис. 13 б).

6. Рухлива шарнірна опора. Реакція спрямована перпендикулярно до площини опори (площини катання) (рис. 14, а, б).

7. Циліндричний шарнір (рис. 15 а), радіальний підшипник (рис. 15 б). Реакція проходить через центр шарніру (центр серединного перерізу підшипника) і лежить у площині перпендикулярної осі шарніра (підшипника).
Вона еквівалентна двом невідомим за модулем силам - складовим цієї реакції вздовж відповідних координатних осей (сили на рис. 15, а; і на рис. 15 б). (Пояснення щодо цього див. також у прикладі на сторінці 16).


8. Сферичний шарнір (рис. 16, а), підп'ятник (або радіально-упорний підшипник) (рис. 16, б). Реакція складається з трьох невідомих за модулем сил - складових реакції вздовж осей просторової системи координат.
9. Жорстка загортання (рис. 17). При дії на тіло плоскої системи сил повна реакція закладення складається з сили з складовими ХА і УА, і пари сил з моментом М, розташованих у тій же площині, що сили, що діють.
10. Ковзаюче закладення (рис. 18). У разі плоскої системи сил та відсутності тертя реакція складається з сили N та пари сил з моментом М, розташованих в одній площині з діючими силами. Сила N перпендикулярна до ковзання.



Запитання для самоперевірки
1. Що називається абсолютно твердим тілом, матеріальною точкою?
2. Вкажіть елементи сили. Якими способами можна встановити силу?
3. Що називається векторним моментом сили щодо точки Що таке момент сили алгебри?
4. У якому разі момент сили щодо точки дорівнює нулю?
5. Що називається системою сил? Які системи сил називаються еквівалентними?
6. Що називається рівнодією системи сил?
7. Дайте визначення невільного твердого тіла, зв'язку, реакції зв'язку?
8. Чи можна невільне тіло розглядати як вільне?
9. На які дві групи діляться сили, що діють на вільне тверде тіло?
Будь-яке вільне тіло у просторі має шість ступенів свободи: воно може переміщатися вздовж трьох осей і обертатися щодо цих осей. У вільному стані тіла знаходяться рідко, здебільшого їхнє переміщення обмежене зв'язками. Зв'язками називають обмеження, що виключають можливість руху тіла у певному напрямку. Якщо па закріплене тіло діють активні сили, то зв'язках виникають реактивні сили або реакції, що доповнюють систему активних сил до рівноважної. Сукупність активних та реактивних урівноважених сил визначає напружений стан тіла та його деформацію.
Реакції зв'язків знаходять за допомогою рівнянь рівноваги. При цьому рішення ведеться за таким планом:
- виявляють зовнішні активні сили, прикладені до виділеного тіла або групи тіл;
- виділений об'єкт (тіло) звільняють від зв'язків і натомість прикладають сили реакції зв'язків;
- обравши координатні осі, становлять рівняння рівноваги і, вирішивши їх, знаходять сили реакції зв'язків.
Для просторової системи сил можна становити шість рівнянь рівноваги (13.7). З допомогою цих рівнянь визначаються шість невідомих реакцій.
Завдання, які вирішуються лише за допомогою рівнянь рівноваги статики, називають статично визначальними.Якщо на виділений об'єкт буде накладено більше зв'язків, то завдання стає статично невизначеноюі для її вирішення, крім рівнянь рівноваги, необхідно використовувати додаткові рівняння, що складаються на підставі аналізу деформацій. У випадку закріплення чи з'єднання двох деталей може виключати від однієї до шести ступенів свободи, тобто. накладати від одного до шести зв'язків. Відповідно, у закріпленні може виникнути від однієї до шести реакцій. Кількість реактивних сил та їх напрямок залежить від характеру зв'язків.
Наведемо найпоширеніші типи закріплення та з'єднання деталей.
- 1. З'єднання, що унеможливлюють переміщення тільки в одному напрямку. У таких сполуках виникає лише одна реакція певного спрямування. До сполук цього типу відносяться:
- а) з'єднання за допомогою торкання двох тіл у точці або по лінії. При торканні виникає реакція, спрямована за загальною нормаллю до поверхонь торкання (рис. 13.5). Така сполука називається шарнірно-рухомою;
Мал. 13.5.
- б) з'єднання, що здійснюється тросом, нітіо, цепио, дає реакцію, спрямовану вздовж гнучкого зв'язку, причому такий зв'язок може працювати тільки на розтягування (див. рис. 13.5, б);
- в) з'єднання у вигляді жорсткого прямого стрижня з шарнірним закріпленням кінців також дає реакцію, спрямовану вздовж осі стрижня (див. рис. 13.5, в) уале може працювати як на розтяг, так і на стиск.

Мал. 13.6.
На рис. 13.5, гпоказано тіло з трьома накладеними на нього зв'язками; кожен зв'язок виключає можливість руху в одному напрямку та дає одну реакцію, напрямок якої відомий.
- 2. Закріплення або з'єднання, що виключає переміщення по двох напрямках і відповідно дає дві реакції, має назву шарнірно-нерухомої опори або циліндричного шарніра (рис. 13.6).
- 3. З'єднання, що виключає переміщення за трьома напрямками і дає три реакції, має назву просторового або кульового шарніра (рис. 13.7).
- 4. Закріплення, що виключає всі шість ступенів свободи, має назву жорсткого закріплення або закладення. У закладенні можуть виникнути шість реактивних силових факторів - три реактивні сили та три реактивні моменти (рис. 13.8). При дії на тіло з жорстким закладенням сил, розташованих в одній площині, в закладенні виникають дві реактивні сили і один реактивний момент.

Мал. 13.7.

Мал. 13.8.
При розрахунках опори схематизують і умовно поділяють на три основні групи:
- шарнірно-рухлива(рис. 13.9, а),сприймає лише одну лінійну реакцію /?;
- шарнірно-нерухома(рис. 13.9 б), що сприймає дві лінійні реакції Rі н.
- затискання, або закладення(рис. 13.9, в), що сприймає лінійні реакції Rі Нта момент М.

Мал. 13.9.
При дотику реальних тіл і за їх відносному русі у місцях їхнього контакту виникають сили тертя, які можна як особливий вид реактивних сил. Сила тертя розташована у площині торкання тіл; при русі вона спрямована у бік, протилежний відносної швидкості тіла.
приклад.Вал 1 із закріпленим на ньому зубчастим колесом 2 встановлений у двох підшипниках Аі Ст.Па вільному кінці валу насаджений шків ремінної передачі 3 (рис. 13.10), Відомі геометричні розміри а, с, що передавали крутний момент М, діаметр шківа Д всі параметри конічного зубчастого колеса, а також співвідношення сил натягу ременя F a JF al= 2. Потрібно визначити реакції опор та сили натягу ременя.

Мал. 13.10.
Рішення проводимо у три етани.
1. Виявляємо активні сили, які у системі. Па конічне зубчасте колесо діє просторово розташована сила, складові якої по осях координат позначені відповідно F v F rі Fa .Складова F ( ,звана окружною силою, визначається але заданому крутному моменту на підставі рівняння моментів щодо осі z

Радіальна складова F rта осьова складова F aвизначаються за окружною силою F (на підставі заданої геометрії зубчастого конічного колеса.
2. Звільняємо вал (об'єкт рівноваги) від зв'язків і замість них прикладаємо сили реакції Х л У л, Х ст, Y B Z B .
Підшипники Аі Услід розглядати як шарнірні опори, тому що в них завжди є зазори. В опорі Авиникають дві реакції Х лі У л,оскільки ця опора забороняє переміщення валу лише поперечних напрямах. У правій опорі виникають три реакції Х ст, У сті Z B ,тому що вона обмежує переміщення валу також і в осьовому напрямку. Активні та реактивні сили в сукупності утворюють просторову систему врівноважених сил.
3. Вибираємо систему координат: осі хі умаємо в площині, перпендикулярної осі валу, а вісь zнаправляємо по осі валу. Складаємо шість рівнянь рівноваги, використовуючи (13.7) та (13.8).

Використовуючи задану умову F al = 2F ii2і розв'язавши рівняння рівноваги, знайдемо сили F aV F a2та реакції опор
Одним із основних понять механіки є поняття механічної системи. Під механічною системою розуміють сукупність кінцевого чи нескінченного числа матеріальних точок (або тіл), що взаємодіють між собою відповідно до третього закону Ньютона. Звідси випливає, що рух кожної точки (або тіла) системи залежить як від положення, так і від руху інших точок механічної системи, що розглядається.
Системи розрізняють вільні та невільні. Система називається вільною, якщо всі точки, що входять до неї, можуть займати довільні положення і мати довільні швидкості. В іншому випадку, тобто коли матеріальні точки, що входять до системи, не можуть займати довільних положень або не можуть мати довільних швидкостей, система називається невільною.
Прикладом вільної механічної системи може бути сонячна система, у якій Сонце і планети можна як матеріальні тіла, що під взаємним впливом сил ньютоніанського тяжіння.
Прикладом невільної системи може бути система, що складається з точок, з яких одна або
дещо змушені при своєму русі залишатися на будь-яких лініях чи поверхнях.
Із зазначеним розподілом систем на вільні та невільні пов'язане поняття зв'язку.
Під зв'язком у механіці розуміють умови, що накладають обмеження на свободу переміщення точок системи. Зв'язки можуть накладати обмеження як положення точок, і з їхньої швидкості. Практично зв'язки здійснюються за допомогою матеріальних тіл або пристроїв (стрижнів, ниток, шарнірів тощо).
Подібно до того як сили, що діють на точки системи, поділяють на сили внутрішні і зовнішні сили, так і зв'язки, накладені на точки системи, можна підрозділити на внутрішні внутрішні і зв'язки зовнішні. Під внутрішніми зв'язками розуміють такі зв'язки, які накладені на точки системи, не перешкоджають системі вільно переміщатися після того, як вона раптово затвердіє. Зв'язок, що не володіє цією властивістю, називається зовнішнім. Наприклад, якщо дві точки твердого тіла з'єднані між собою нерозтяжним і невагомим стрижнем, такий зв'язок буде внутрішнім. Таким чином, тверде тіло можна розглядати як систему, підпорядковану внутрішнім зв'язкам. Якщо ж одна з точок твердого тіла шарнірно закріплена, то в цьому випадку зв'язок буде зовнішнім.
Система, підпорядкована лише внутрішнім зв'язкам, є вільної, оскільки може переміщатися як вільне тверде тіло. Якщо ж серед зв'язків, накладених на точки системи, є зовнішні зв'язки, то система є невільною.
Умови, що обмежують свободу переміщення точок системи, аналітично виражаються у вигляді рівнянь чи нерівностей виду.
де - час, - відповідно координати та швидкості точки системи,
віднесені до деякої інерційної системи відліку, щодо якої розглядається рух цієї системи.
Зв'язки розрізняють утримуючі та неутримуючі; першим відповідає знак рівності (1.1), другим - знак нерівності.
Утримуючі та неутримуючі зв'язки іноді відповідно називають двосторонніми та односторонніми зв'язками. Утримуючий зв'язок, перешкоджаючи переміщенню в одному напрямку, перешкоджає переміщенню в протилежному напрямку. Неутримуючий зв'язок перешкоджає переміщенню в одному напрямку, але не перешкоджає переміщенню в протилежному напрямку.
Прикладом утримуючого зв'язку можуть бути дві паралельні площини, між якими відбувається рух кульки. Розглядаючи середню між ними площину як координатну площину отримуємо рівняння зв'язку у вигляді: Якщо ж кулька рухається горизонтальною площиною будь-який момент може покинути її, то ця площина буде неутримуючим зв'язком. Умова такого зв'язку виражатиметься нерівністю (або ).
Іншим прикладом неутримуючого зв'язку може бути нитка з кулькою на кінці. Приймаючи точку підвісу нитки за початок координат і вважаючи нитку нерозтяжною, можемо умову зв'язку записати у вигляді нерівності
де – координати кульки, – довжина нитки.
Якщо в процесі руху кульки виконується нерівність
то це означає, що нитка ослаблена і кулька звільнилася від зв'язку.
Якщо ж під час руху кульки виконується рівність
то це означає, що нитка натягнута, і на кульку діє зв'язок.
Залежно від того, чи містить рівняння зв'язку в явному вигляді час чи ні, зв'язки поділяються на нестаціонарні (реономні) та стаціонарні (склерономні).
Зв'язки, які накладають обмеження лише на положення точок системи, називаються кінцевими чи геометричними; аналітично вони виражаються рівнянням
Тут і надалі припускаємо зв'язки, що утримують.
Якщо ж зв'язки накладають обмеження як на положення точок, а й у їх швидкості, всі вони називаються диференціальними чи кінематичними, та його аналітичне вираз має вигляд
Зв'язки поділяють також на голономні та неголономні. До голономних зв'язків відносять всі кінцеві або геометричні зв'язки виду (1.2), тобто всі зв'язки, які накладають обмеження на можливі положення точок системи. До голономних зв'язків відносяться також і диференціальні зв'язки, які шляхом інтегрування можуть бути приведені до співвідношення виду (1.2):

де - Деякі функції координат можливо, часу .
Якщо ж диференціальні зв'язки виду (1.4) не можуть бути шляхом інтегрування приведені до кінцевих співвідношень виду (1.2), то вони називаються
нелономними або неінтегрованими. Г. Герц звернув увагу на важливість різниці між голономними та нелономними зв'язками для поняття віртуального переміщення системи.
Легко бачити, що якщо голономні зв'язки накладають обмеження на можливі положення точок системи, то нелономні зв'язки накладають обмеження на швидкості точок системи. Це випливає з того, що рівняння нелономного зв'язку (1.4) завжди може бути представлене у такому вигляді:

Механічні системи, підпорядковані голономним зв'язкам, називаються голономними системами. Якщо ж серед зв'язків є неголономні, то системи називаються неголономними.
Якщо на систему накладені лише неголономні зв'язки, то така система називається абсолютно неголономною або власне неголономною.
Класичним прикладом руху нелономної системи може бути кочення твердої кулі по шорсткої площині (наприклад, рух більярдної кулі).
Нехай тверда куля радіусом котиться без ковзання абсолютно шорсткою площиною. Візьмемо дві системи координат із загальним початком у центрі кулі С. Одна з них (система нехай рухається поступально, а друга (система) нехай буде жорстко пов'язана із кулею (рис. 1)).
Положення кулі в кожний момент часу може бути визначено п'ятьма координатами: двома координатами центру кулі (третя координата) та трьома кутами Ейлера: кутом прецесії кутом нутації 0 та кутом власного обертання (рис. 1). Умовою зв'язку в задачі, що розглядається, є умова торкання кулі з площиною і звернення
в нуль швидкості точки А торкання кулі. Приймаючи центр кулі З за полюс і позначаючи його швидкість через миттєву кутову швидкість обертання кулі - через , а вектор-радіус, проведений з центру кулі в точку торкання - через , можемо записати швидкість точки А в наступному вигляді:

Проектуючи цю векторну рівність на осі координат і задовольняючи умову зв'язку, отримуємо
де - складові вектора кутової швидкості. Останнє рівняння інтегрується і дає одне рівняння зв'язку, що показує, що центр кулі З рухається в площині, паралельної площині і віддаленої від неї на відстані, що дорівнює радіусу кулі R.
Усі теореми і рівняння статики виводяться з кількох вихідних положень, прийнятих без математичних доказів і званих аксіомами чи принципами статики. Аксіоми статики є результатом узагальнень численних дослідів і спостережень над рівновагою і рухом тіл, неодноразово підтверджених практикою. Частина цих аксіом є наслідками основних законів механіки, із якими ми познайомимося у поступовій динаміці.
Аксіома 1.Якщо на вільне абсолютно тверде тіло діють дві сили, то тіло може перебувати в рівновазі тоді і тільки тоді, коли ці сили дорівнюють модулю ( F 1 = F 2) і спрямовані вздовж однієї прямої у протилежні сторони (рис. 10).
Рис.10
Аксіома 1 визначає найпростішу врівноважену систему сил, оскільки досвід показує, що вільне тіло, на яке діє тільки одна сила, перебувати в рівновазі не може.
Аксіома 2.Дія даної системи, сил на абсолютно тверде тіло не зміниться, якщо до неї додати або від неї відібрати врівноважену систему сил.
Ця аксіома встановлює, що дві системи сил, що відрізняються на врівноважену систему, еквівалентні одна одній.
Наслідок з 1-ї та 2-ї аксіом. Дія сили на абсолютно тверде тіло не зміниться, якщо перенести точку застосування сили вздовж її лінії дії в будь-яку іншу точку тіла.
Рис.11
Насправді, нехай на тверде тіло діє прикладена в точці Асила (рис.11). Візьмемо на лінії дії цієї сили довільну точку Уі докладемо до неї дві врівноважені сили і такі, що = , = . Від цього дія сили на тіло не зміниться. Але сили і згідно з аксіомою 1 також утворюють врівноважену систему, яка може бути відкинута. У результаті на тіло. Діятиме лише одна сила, рівна, але прикладена в точці У.
Таким чином, вектор, що зображує силу, можна вважати прикладеним у будь-якій точці на лінії дії сили (такий вектор називається ковзним).
Аксіома 3(Аксіома паралелограма сил). Дві сили, прикладені до тіла в одній точці, мають рівнодіючу, прикладену в тій же точці та зображувану діагоналлю паралелограма, побудованого на цих силах, як на сторонах.
Вектор , що дорівнює діагоналі паралелограма, побудованого на векторах і (рис.12), називається геометричною сумою векторів і : = + .
Рис.12
Розмір рівнодіючої
|
Звичайно, Така рівність буде дотримуватися тільки за умови, що ці сили спрямовані по одній прямій в один бік. Якщо вектори сил виявляться перпендикулярними, то
Отже, аксіому 3 можна формулювати так: дві сили, прикладені до тіла в одній точці, мають рівнодіючу, рівну геометричній (векторної) сумі цих сил і додану в тій же точці.
Аксіома 4.При будь-якій дії одного матеріального тіла на інше має місце таке ж за величиною, але протилежне за напрямом протидія.
Закон про рівність дії та протидії є одним з основних законів механіки. З нього випливає, що якщо тіло Адіє на тіло В з силою, то одночасно тіло Удіє на тіло Аз такою ж за модулем і спрямованою вздовж тієї ж прямої, але протилежну сторону силою = (рис. 13). Однак сили і не утворюють врівноваженої системи сил, оскільки вони прикладені до різних тіл.
Рис.13
Аксіома 5(Принцип затвердіння). Рівнавага тіла, що змінюється (деформується), що знаходиться під дією даної системи сил, не порушиться, якщо тіло вважати затверділим (абсолютно твердим).
Висловлене у цій аксіомі твердження очевидне. Наприклад, ясно, що рівновага ланцюга не порушиться, якщо її ланки вважати звареними один з одним і т.д.
Зв'язки та його реакції.
За визначенням, тіло, яке не скріплене з іншими тілами і може здійснювати з цього положення будь-які переміщення в просторі, називається вільним(наприклад, повітряна куля у повітрі). Тіло, переміщенням якого у просторі перешкоджають якісь інші, скріплені або стикаються з ним тіла, називається невільним. Все те, що обмежує переміщення даного тіла в просторі, називатимемо зв'язком.
Наприклад, тіло, що лежить на столі, - невільне тіло. Його зв'язком є площина столу, яка перешкоджає переміщенню тіла вниз.
Дуже важливий так званий принцип звільнення, Яким будемо користуватися надалі. Записується так.
Будь-яке невільне тіло можна зробити вільним, якщо прибрати зв'язки, а дію їх на тіло замінити силами, такими, щоб тіло залишалося в рівновазі.
Сила, з якою цей зв'язок діє на тіло, перешкоджаючи тим мулу іншим його переміщенням, називається силою реакції (протидії) зв'язку або просто реакцією зв'язку.
Так у тіла, що лежить на столі, зв'язок – стіл. Тіло невільне. Зробимо його вільним - стіл приберемо, а щоб тіло залишилося в рівновазі, замінимо стіл силою, спрямованою вгору і рівною, звичайно, вагою тіла.
Направлена реакція зв'язку у бік, протилежний до тієї, куди зв'язок не дає переміщатися тілу. Коли зв'язок одночасно перешкоджає переміщенням тіла за декількома напрямками, напрям реакції зв'язку також наперед невідомий і повинен визначатися в результаті розв'язання задачі.
Розглянемо, як спрямовані реакції деяких основних видів зв'язків.
1. Гладка площина (поверхня) чи опора. Гладкою називатимемо поверхню, тертям про яку даного тіла можна в першому наближенні знехтувати. Така поверхня не дає тілу переміщатися тільки в напрямку загального перпендикуляра (нормалі) до поверхонь тіл, що стикаються, в точці їх торкання (рис. 14, а). Тому реакція Nгладкої поверхні або опори спрямована за загальною нормалі до поверхонь тіл, що стикаються, в точці їх торкання і прикладена в цій точці. Коли одна з поверхонь, що стикаються, є точкою (рис. 14, б), то реакція спрямована за нормаллю до іншої поверхні.
Якщо поверхні не гладкі, треба додати ще одну силу - силу тертя, яка спрямована перпендикулярно до нормальної реакції у бік, протилежну можливому ковзанню тіла.
Рис.14 Рис.15
Рис.16
2. Нитка. Зв'язок, здійснений у вигляді гнучкої нерозтяжної нитки (рис.15), не дає тілу Мвіддалятися від точки підвісу нитки за напрямом AM. Тому реакція Тнатягнутої нитки спрямована вздовж нитки від тіладо точки її підвісу. Якщо навіть заздалегідь можна здогадатися, що реакція спрямована до тіла, її треба спрямувати від тіла. Таке правило. Воно позбавляє зайвих і непотрібних припущень і, як переконаємося далі, допомагає встановити стиснутий стрижень або розтягнутий.
3. Циліндричний шарнір (підшипник). Якщо два тіла з'єднані болтом, що проходить через отвори в цих тілах, то така сполука називається шарнірною або просто шарніром; осьова лінія болта називається віссю шарніра. Тіло АВ, прикріплене шарніром до опори D(Рис.16, а), може повертатися як завгодно навколо осі шарніра (у площині креслення); при цьому кінець Атіла не може переміститися ні за яким напрямом, перпендикулярним до осі шарніра. Тому реакція Rциліндричного шарніра може мати будь-який напрямок у площині, перпендикулярній до осі шарніра, тобто. у площині Аху. Для сили Rу цьому випадку наперед не відомі ні її модуль R, ні напрям-ня (кут).
4. Кульовий шарнір та підп'ятник. Цей вид зв'язку закріплює якусь точку тіла так, що вона не може здійснювати ніяких переміщень у просторі. Прикладами таких зв'язків служать кульова п'ята, за допомогою якої прикріплюється фотоапарат до штативу (рис.16, б) та підшипник з упором (підп'ятник) (рис. 16, в). Реакція Rкульового шарніра або підп'ятника може мати будь-який напрямок у просторі. Для неї наперед невідомі ні модуль реакції R, ні кути, що утворюються нею з осями х, у, z.
Рис.17
5. Стрижень. Нехай у якійсь конструкції зв'язком є стрижень АВ, Закріплений на кінцях шарнірами (рис.17). Приймемо, що вагою стрижня в порівнянні з навантаженням, що сприймається ним, можна знехтувати. Тоді на стрижень діятимуть лише дві сили, прикладені в шарнірах. Аі У. Але якщо стрижень АВзнаходиться в рівновазі, то по аксіомі 1 прикладені в точках Аі Усили мають бути спрямовані вздовж однієї прямої, тобто вздовж осі стрижня. Отже, навантажений на кінцях стрижень, вагою якого порівняно з цими навантаженнями можна знехтувати, працює тільки на розтягнення або на стиск. Якщо такий стрижень є зв'язком, реакція стрижня буде спрямована вздовж осі стрижня.
6. Рухлива шарнірна опора (рис.18, опора А) перешкоджає руху тіла тільки в напрямку перпендикулярному площині ковзання опори. Реакція такої опори спрямована нормалі до поверхні, на яку спираються катки рухомої опори.
7. Нерухома шарнірна опора (рис.18, опора У). Реакціятакої опори проходить через вісь шарніра і може мати будь-який напрямок у площині креслення. При вирішенні завдань реакцію зображатимемо її складовими і за напрямами осей координат. Якщо ми, вирішивши завдання, знайдемо і , то цим буде визначено і реакцію; за модулем
Рис.18
Спосіб закріплення, показаний на рис.18, використовується для того, щоб у балці АВне виникало додаткових напруг при зміні її довжини від зміни температури або вигину.
Зауважимо, що якщо опору Абалки (рис.18) зробити теж нерухомий, то балка при дії на неї будь-якої плоскої системи сил буде статично невизначеною, так як тоді в три рівняння рівноваги увійдуть чотири невідомі реакції , , , .
8. Нерухлива защемляюча опора або жорстка загортання (рис.19). У цьому випадку на закріплений кінець балки з боку опорних площин діє система розподілених сил реакцій. Вважаючи ці сили наведеними до центру А
Іноді доводиться вивчати рівновагу нетвердих тіл. При цьому будемо скористатися припущенням, що якщо це нетверде тіло знаходиться в рівновазі під дією сил, то його можна розглядати як тверде тіло, використовуючи всі правила та методи статики.